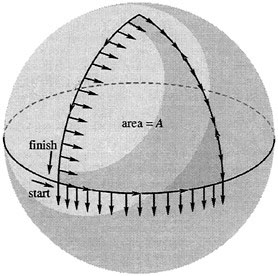
In all these cases, cyclic motion in one set of variables (often called theinternal variables) produces motion in another set (often called the groupvariables). This idea is central to the basic geometric framework described in ensuing sections.
One can generate translational motion as well as rotational motion. For example, microorganisms and snakes generate translations by a very specific cyclic manipulation of their internal variables (Shapere and Wilczek, 1987). The reason for this is, in a superficial sense, that in these examples, translation is kinematically possible (translations are available as group variables) and the controls are such that these variables are activated. Often translational motion and rotational motion are coupled in interesting ways, as in the snakeboard, a modification of the familiar skateboard. This modification allows the rider to rotate the front and back wheels by rotating his feet and this, together with the rotary motion of the rider's body, allowsboth translational and rotational motion to be generated. Such motion can be controlled with the objective that desired motions be generated. We will discuss this example in a little more detail in the section entitled "The Snakeboard," below.
The generation of motion in small robotic devices is very promising for medical applications. In this context, one seeks devices that can move in confined spaces under variable conditions (flexible walls, tight comers, etc.). In fact, this general philosophy is one of the reasons one hopes that medical operations in the future will be much less intrusive than many of them are now.
There are similar links between vibratory motion and translational and rotational motion (e.g., the developments of micromotors) (Brockett, 1989), on the one hand, and, on the other hand, motion generation in animals (e.g., the generation and control of waves from coupled oscillators, as seen in the swimming of fish and in the locomotion of insects and other creatures).
A central question to address in this area is, How should one control motions of the internal variables so that the desired group (usually translational and rotational) motions are produced? To make progress on this question, one needs to combine experience with simple systems and strategies—such as steering with sinusoids, as in Murray and Sastry (1993)—with a full understanding of the mathematical structure of the mechanical systems, both analytical and geometrical. We also mention the work of Brockett (1981), which shows that for certain classes of control systems that are controllable via first level brackets, steering by sinusoids is, in fact, optimal.







No comments:
Post a Comment