


The assembly language is a low-level
programming language used to write program code in terms of mnemonics.
Even though there are many high-levellanguages that are currently in
demand, assembly programming language is popularly used in many
applications.It can be used for direct hardware manipulations. It is
also used to write the 8051 programming code efficiently with less number of clock cycles by consuming less memory compared to the other high-level languages.
8051 Programming
8051 Programming in Assembly Language
The assembly language is a fully
hardware related programming language. The embedded designers must have
sufficient knowledge on hardware of particular processor or controllers
before writing the program. The assembly language is developed by
mnemonics; therefore, users cannot understand it easily to modify the
program.
8051 Programming in Assembly Language
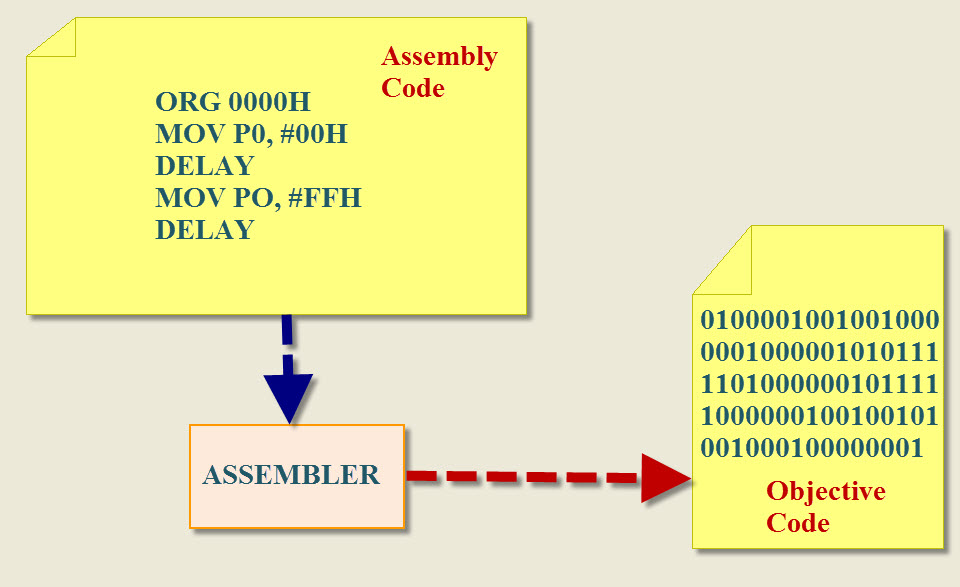
Assembly programming language is developed by various compilers and the “keiluvison” is best suitable for microcontroller programming development. Microcontrollers
or processors can understand only binary language in the form of ‘0s
or 1s’; An assembler converts the assembly language to binary language,
and then stores it in the microcontroller memory to perform the specific task.
8051 Microcontroller Architecuture
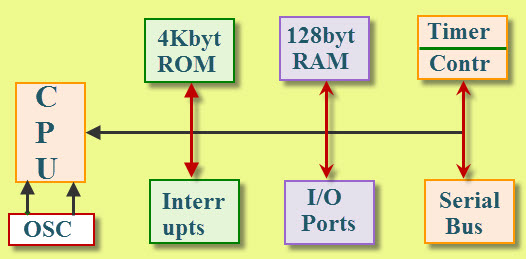
The 8051 microcontroller is the CISC based Harvard architecture, and it has peripherals like 32 I/O, timers/counters, serial communication and memories. The microcontroller requires a program to perform the operations that require a memory for saving and to read the functions. The 8051 microcontroller consists of RAM and ROM memories to store instructions.
8051 Microcontroller Architecuture
A Register is the main part in the processors and microcontrollers
which is contained in the memory that provides a faster way of
collecting and storing the data. The 8051 assembly language programming
is based on the memory registers. If we want to manipulate data to a
processor or controller by performing subtraction, addition, etc., we
cannot do that directly in the memory, but it needs registers to process
and to store the data. Microcontrollers contain several types of registers that can be classified according to their instructions or content that operate in them.
8051 Microcontroller Programs in Assembly Language
The assembly language is made up of elements which all are used to write the program in sequential manner. Follow the given rules to write programming in assembly language.
Rules of Assembly Language
- The assembly code must be written in upper case letters
- The labels must be followed by a colon (label:)
- All symbols and labels must begin with a letter
- All comments are typed in lower case
- The last line of the program must be the END directive
The assembly language mnemonics are in
the form of op-code, such as MOV, ADD, JMP, and so on, which are used to
perform the operations.
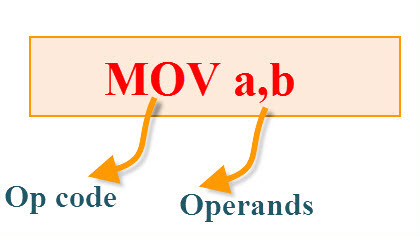
Operands: The operands
are a single piece of data that can be operated by the op-code.
Example, multiplication operation is performed by the operands that are
multiplied by the operand.
Syntax: MUL a,b;
The Elements of an Assembly Language Programming:
- Assembler Directives
- Instruction Set
- Addressing Modes
Assembler Directives:
The assembling directives give the directions to the CPU. The 8051 microcontroller
consists of various kinds of assembly directives to give the direction
to the control unit. The most useful directives are 8051 programming,
such as:
- ORG
- DB
- EQU
- END
ORG(origin):
This directive indicates the start of the program. This is used to set
the register address during assembly. For example; ORG 0000h tells the
compiler all subsequent code starting at address 0000h.
Syntax: ORG 0000h
DB(define byte):
The define byte is used to allow a string of bytes. For example, print
the “EDGEFX” wherein each character is taken by the address and finally
prints the “string” by the DB directly with double quotes.
Syntax:
ORG 0000h
MOV a, #00h————-
————-
DB”EDGEFX”
EQU (equivalent): The equivalent directive is used to equate address of the variable.
Syntax:
reg equ,09h
—————–
—————–
MOV reg,#2h
END:The END directive is used to indicate the end of the program.
Syntax:
reg equ,09h
—————–
—————–
MOV reg,#2h
END
Addressing Modes:
The way of accessing data is called
addressing mode. The CPU can access the data in different ways by using
addressing modes. The 8051 microcontroller consists of five addressing modes such as:
- Immediate Addressing Mode
- Register Addressing Mode
- Direct Addressing Mode
- Indirect Addressing Mode
- Base Index Addressing Mode
Immediate Addressing Mode:
In this addressing mode, the source must be a value that can be followed by the ‘#’ and destination must be SFR registers, general purpose registers and address. It is used for immediately storing the value in the memory registers.
MOV A, #20h //A is an accumulator register, 20 is stored in the A//
MOV R0,#15 // R0 is a general purpose register; 15 is stored in the R0 register//
MOV P0, #07h //P0 is a SFR register;07 is stored in the P0//
MOV 20h,#05h //20h is the address of the register; 05 stored in the 20h//
Ex:
MOV R0, #1
MOV R0, #20 //R0 <—R0[15]+20, the final value is stored in R0//
Register Addressing Mode:
In this addressing mode, the source and destination must be a register, but not general purpose registers. So the data is not moved within the general purpose bank registers.
Syntax:
MOV A, B; // A is a SFR register, B is a general purpose register//
MOV R0, R1 //Invalid instruction, GPR to GPR not possible//
EX:
MOV R0, #02h
MOV A, #30h
ADD R0, A //R0<—R0+A, the final value is stored in the R0 register//
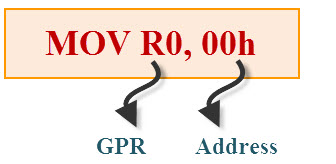
Direct Addressing Mode
In this addressing mode, the source or destination (or both source and destination) must be an address, but not value.
MOV A,20h // 20h is an address; A is a register//
MOV 00h, 07h // both are addressed of the GPS registers//
Ex:
MOV 07h,#01h
MOV A, #08h
ADD A,07h //A<—A+07h the final value is stored in A//
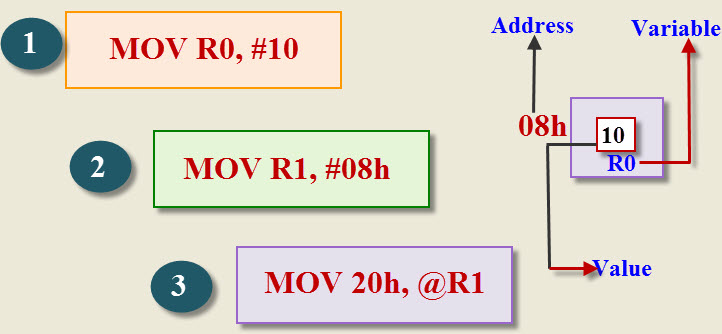
Indirect Addressing Mode:
In this addressing mode, the source or destination (or destination or source) must be a
indirect address, but not a value. This addressing mode supports the
pointer concept. The pointer is a variable that is used to store the
address of the other variable. This pointer concept is only used for R0
and R1 registers.
MOVR0, #01h //01 value is stored in the R0 register, R0 address is 08h//
MOV R1, #08h//R1 is the pointer variable that stores address (08h) of R0 //
MOV 20h,@R1 //01 value is stored in the 20h address of the GP register//
Indirect Addressing Mode
This addressing mode is used to read the data from the external memory or ROM memory.
All addressing modes cannot read the data from the code memory. The
code must read through the DPTR register. The DPTR is used to point the
data in the code or external memory.
MOVC A, @A+DPTR //C indicates code memory//
MOCX A, @A+DPTR // X indicate external memory//
EX: MOV A, #00H //00H is stored in the A register//
MOV DPTR, #0500H //DPTR points 0500h address in the memory//
MOVC A, @A+DPTR //send the value to the A register//
MOV P0, A //date of A send to the PO registrar//
Instruction Set:
The instruction set is the structure of
the controller or processor that provides commands to the controller to
guide the controller for processing data. The instruction set consists
of instructions, native data types, addressing modes, interrupt
registers, exceptional handling and memory architecture. The 8051 microcontroller can
follow CISC instructions with Harvard architecture. In case of the 8051
programming different types of CISC instructions include:
- Data Transfer Instruction set
- Sequential Instruction Set
- Arithmetic Instruction set
- Branching Instruction set
- Loop Instrcution Set
- Conditional Instruction set
- Unconditional Instruction set
- Logical Instruction set
- Boolean Instruction set
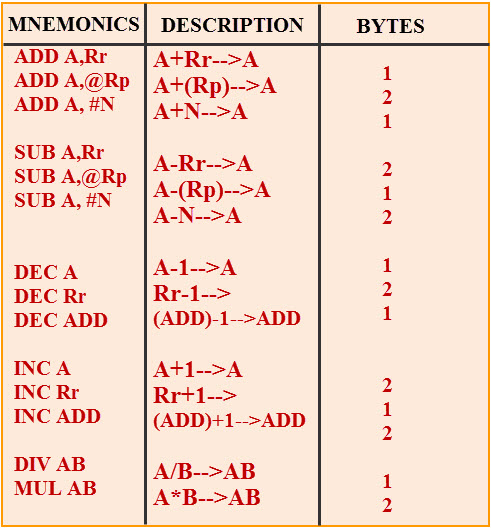
Arithmetic Instruction Set:
The arithmetic instructions perform the basic operations such as:
- Addition
- Multiplication
- Subtraction
- Division
Addition:
ORG 0000h
MOV R0, #03H // move the value 3 to the register R0//
MOV A, #05H // move the value 5 to accumulator A//
Add A, 00H // addA value with R0 value and stores the result inA//
END
MOV R0, #03H // move the value 3 to the register R0//
MOV A, #05H // move the value 5 to accumulator A//
Add A, 00H // addA value with R0 value and stores the result inA//
END
ORG 0000h
MOV R0, #03H // move the value 3 to the register R0//
MOV A, #05H // move the value 5 to accumulator A//
MUL A, 03H // Multiplied result is stored in the Accumulator A //
END
MOV R0, #03H // move the value 3 to the register R0//
MOV A, #05H // move the value 5 to accumulator A//
MUL A, 03H // Multiplied result is stored in the Accumulator A //
END
ORG 0000h
MOV R0, #03H // move the value 3 to register R0//
MOV A, #05H // move the value 5 to accumulator A//
SUBB A, 03H // Result value is stored in the Accumulator A //
END
Division:
ORG 0000h
MOV R0, #03H // move the value 3 to register R0//
MOV A, #15H // move the value 5 to accumulator A//
DIV A, 03H // final value is stored in the Accumulator A //
END
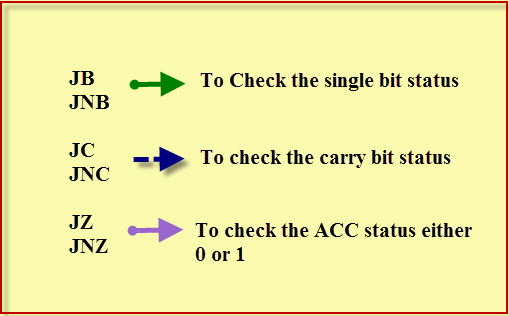
Conditional Instructions
The CPU executes the instructions based on the condition by checking the single bit status or byte status. The 8051 microcontroller consists of various conditional instructions such as:
- JB —>Jump below
- JNB —> Jump if not below
- JC —> Jump if Carry
- JNC —>Jump if not Carry
- JZ —>Jump if Zero
- JNZ —> Jump if not Zero
Conditional Instructions
1. Syntax:
JB P1.0, label
– – – – – – – –
– – – – – – – –
Label: – – – – – – – –
– – – – – – – –
END
– – – – – – – –
– – – – – – – –
Label: – – – – – – – –
– – – – – – – –
END
JNB P1.0, label
– – – – – – – –
– – – – – – – –
Label: – – – – – – – –
– – – – – – – –
END
3. Syntax:
JC, label
– – – – – – – –
– – – – – – – –
Label: – – – – – – – –
– – – – – – – –
END
– – – – – – – –
– – – – – – – –
Label: – – – – – – – –
– – – – – – – –
END
JNC, label
– – – – – – – –
– – – – – – – –
Label: – – – – – – – –
– – – – – – – –
END
5. Syntax:
JZ, label
– – – – – – – –
– – – – – – – –
Label: – – – – – – – –
– – – – – – – –
END
6. Syntax:
JNZ, label
– – – – – – – –
– – – – – – – –
Label: – – – – – – – –
– – – – – – – –
END
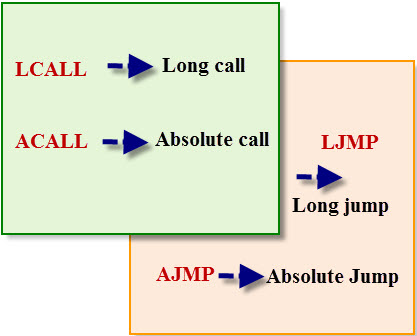
Call and Jump Instructions:
The call and jump instructions are used
to avoid the code replication of the program. When some specific code
used more than once in different places in the program, if we mention specific name to code then
we could use that name anywhere in the program without entering a code
for every time. This reduces the complexity of the program. The 8051
programming consists of call and jump instructions such as LCALL, SJMP.
- LCALL
- ACALL
- SJMP
- LJMP
1. Syntax:
ORG 0000h
– – – – – – – –
– – – – – – – –
ACALL, label
– – – – – – – –
– – – – – – – –
SJMP STOP
Label: – – – – – – – –
– – – – – – – –
– – – – – – – –
ret
STOP:NOP
2. Syntax:– – – – – – – –
– – – – – – – –
ACALL, label
– – – – – – – –
– – – – – – – –
SJMP STOP
Label: – – – – – – – –
– – – – – – – –
– – – – – – – –
ret
STOP:NOP
ORG 0000h
– – – – – – – –
– – – – – – – –
LCALL, label
– – – – – – – –
– – – – – – – –
SJMP STOP
Label: – – – – – – – –
– – – – – – – –
– – – – – – – –
ret
STOP:NOP
Call and Jump Instructions
Loop Instructions:
The loop instructions are used to repeat
the block each time while performing the increment and decrement
operations. The 8051 microcontroller consist two types of loop instructions:
- CJNE —> compare and jump if not equal
- DJNZ —> decrement and jump if not zero
1. Syntax:
of CJNE
MOV A, #00H
MOV B, #10H
Label:INC A
– – – – – –
– – – – – –
CJNE A, label
MOV A, #00H
MOV B, #10H
Label:INC A
– – – – – –
– – – – – –
CJNE A, label
of DJNE
MOV R0, #10H
Label:– – – – – –
– – – – – –
DJNE R0, label
– – – – – –
– – – – – –
END
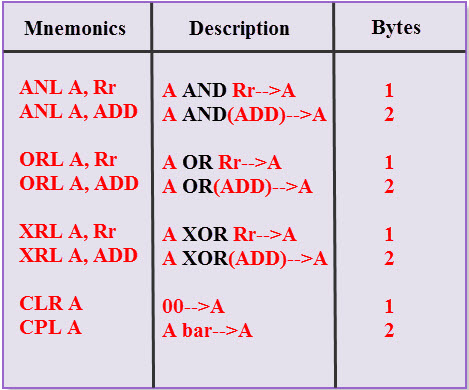
Logical Instruction Set:
The 8051 microcontroller instruction set
provides the AND, OR, XOR, TEST, NOT and Boolean logic instructions for
set and clears the bits based on the need in the program.
Logical Instruction Set
MOV A, #20H /00100000/
MOV R0, #03H /00000101/
ORL A, R0 //00100000/00000101=00000000//
2. Syntax:
MOV A, #20H /00100000/
MOV R0, #03H /00000101/
ANL A, R0
3. Syntax:
MOV A, #20H /00100000/
MOV R0, #03H /00000101/
XRL A, R0
MOV R0, #03H /00000101/
XRL A, R0
Shifting Operators
The shift operators are used for sending and receiving the data efficiently. The 8051 microcontroller consist four shift operators:
- RR —> Rotate Right
- RRC —>Rotate Right through carry
- RL —> Rotate Left
- RLC —>Rotate Left through carry
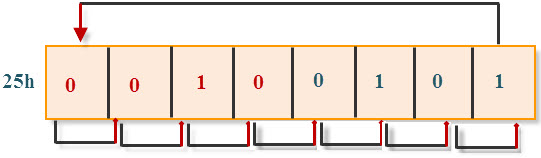
Rotate Right (RR):
In this shifting operation, the MSB becomes LSB and all bits shift towards right side bit-by-bit, serially.
MOV A, #25h
RR A
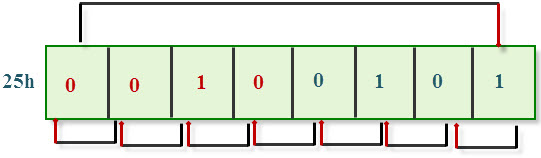
Rotate Left (RL):
In this shifting operation, the MSB becomes LSB and all bits shift towards Left side bit-by-bit, serially.Syntax:
MOV A, #25h
RL A
RRC Rotate Right through Carry:
Syntax:
MOV A, #27h
RRC A
RLC Rotate Left through Carry:
Syntax:
MOV A, #27h
RLC A
Basic Embedded C Programs:
The microcontroller programming differs for each type of operating system. There are many operating systems
such as Linux, Windows, RTOS and so on. However, RTOS has several
advantages for embedded system development. Some of the Assembly level
programming examples are given below.
LED blinking using with 8051 microcontroller:
- Number Displaying on 7-segment display using 8051 microcontroller
- Timer/Counter calculations and program using 8051 microcontroller
- Serial Communication calculations and program using 8051 microcontroller
LED programs with 8051 Microcontrller
ORG 0000H
TOGLE: MOV P1, #01 //move 00000001 to the p1 register//
CALL DELAY //execute the delay//
MOV A, P1 //move p1 value to the accumulator//
CPL A //complement A value //
MOV P1, A //move 11111110 to the port1 register//
CALL DELAY //execute the delay//
SJMP TOGLE
DELAY: MOV R5, #10H //load register R5 with 10//
TWO: MOV R6, #200 //load register R6 with 200//
ONE: MOV R7, #200 //load register R7 with 200//
DJNZ R7, $ //decrement R7 till it is zero//
DJNZ R6, ONE //decrement R7 till it is zero//
DJNZ R5, TWO //decrement R7 till it is zero//
RET //go back to the main program //
END
Timer/Counter Calculations and Program using 8051 Microcontroller:
The delay is the one of the important factors in the application software development. The timers and counters are hardware components of the microcontroller, that are used in many applications to provide the accurate time delay with count pulses. Both the tasks are implemented by the software technique.
MOV TMOD, #10H //select the timer mode by the registers//
MOV TH1, #0FEH // store the delay time in higher bit//
MOV TL1, #32H // store the delay time in low bit//
JNB TF1, $ //decrement the value of the timer till it is zero//
CLR TF1 //clear the timer flag bit//
CLR TR1 //OFF the timer//
2. WAP to toggle the LEDs withthe 5 sec time delay
ORG 0000H
RETURN: MOV PO, #00H
ACALL DELAY
MOV P0, #0FFH
ACALL DELAY
SJUMP RETURN
DELAY: MOV R5, #50H //load register R5 with 50//
DELAY1: MOV R6, #200 //load register R6 with 200//
DELAY2: MOV R7, #229 //load register R7 with 200//
DJNZ R7, $ //decrement R7 till it is zero//
DJNZ R6, DELAY2//decrement R6 till it is zero//
DJNZ R5, DELAY1//decrement R5 till it is zero//
RET //go back to the main program //
END
3. WAP to count the 250 pulses using mode0 count0
Syntax:
ORG 0000H
MOV TMOD, #50H //select the counter//
MOV TH0, #15 //move the counting pulses higher bit//
MOV TH1, #9FH //move the counting pulses, lower bit//
SET TR0 //ON the timer//
JNB $ //decrement the count value till zero//
CLR TF0 //clear the counter, flag bit//
CLR TR0 //stop the timer//
END
Serial Communication Programming Using 8051 Microcontroller:
Serial communication is commonly used for transmitting and receiving the data. The 8051 microcontroller consist of UART/USART serial communication and the signals are transmitted and received by Tx
and Rx pins. The UART communication transfers the data bit-by-bit
serially. The UART is a half-duplex protocol that transfers and receives
the data, but not at the same time.
MOV SCON, #50H //set the serial communication//
MOV TMOD, #20H //select the timer mode//
MOV TH1, #-3 //set the baud rate//
SET TR1 //ON the timer//
MOV SBUF, #’S’ //transmit S to the serial window //
JNB TI, $ //decrement value of the timer till it is zero//
CLR RI // clear receive interrupt //
CLR TR1 //clear timer//
2. WAP to transmit the Receive the character by the Hyper Terminal
MOV TMOD, #20H //select the timer mode//
MOV TH1, #-6 //set the baud rate//
SET TR1 //on the timer//
MOV SBUF, #’S’ //transmit S to the serial window //
JNB RI, $ //decrement value of timer till it is zero//
CLR RI // clear receive interrupt //
MOV P0, SBUF //send the SBUF register value to the port0//
CLR TR1 //clear timer//
This is all about the 8051 Programming
in Assembly language in brief with example-based programs. We hope this
adequate information on assembly language will be certainly helpful for
the readers and we look forward for their valuable comments in the
comment section below.




No comments:
Post a Comment