


Following in the footsteps of its
DARPA Robotics Challenge, DARPA is planning an "Olympics-style"
competition to test the abilities of teeny tiny microrobots.
A Spiritual Successor to the DARPA Robotics Challenge (DRC)
Beginning in 2012 and concluding in 2015, the DARPA Robotics Challenge was an event held to challenge the brightest minds to create robots that could surmount challenges designed to emulate situations found in disaster relief efforts.The competition was posed with the idea that robots have a number of advantages over humans when dealing with search and rescue operations. The most important of these advantages is that search and rescue is inherently dangerous and it's preferable to risk robots than to send humans into perilous situations. Robots also don’t require breathable air and are not affected by toxic or noxious substances.
However, robots do have their disadvantages and it is these disadvantages that prevent them from currently being used in search and rescue. For example, enclosed environments such as caves or collapsed buildings will most likely have connection issues which mean it may not be possible to reliably control a robot remotely. This means that rescue robots require a level of "supervised autonomy" whereby they can navigate an environment, analyze a situation, and complete tasks even if human control is intermittent. Combine that daunting set of issues with the challenges of reliable power and dexterity and you have a truly rigorous test of robotics design skill.
The winning team hailed from Daejon, South Korea, and presented the DRC-HUBO (where HUBO stands for "HUmanoid roBOt"), whose predecessors had been developed by KAIST and Rainbow Co. since 2002. DRC-HUBO's finals performance tied with two other teams for perfect scores, but completed the challenge in the shortest time (44 minutes, 28 seconds).

Team KAIST's DRC-HUBO. Image from DARPA.
The challenges ranged across situations meant to emulate real situations and tasks for rescue workers. This included navigating uneven and unstable ground, but also included more tasks that relied on fine motor control, such as opening doors, turning valves, and even operating tools. There was also a challenge where the robots were tasked with driving a vehicle.
The video below shows the DRC finals from DARPA's official channel. One commenter helpfully pointed out that you may want to watch the events on 2x speed (as the autonomous element of the competition makes for some slow action).
When it comes to navigating and moving debris or even helping get trapped people to safety, there are definite advantages to larger robots.
But this year, DARPA decided to go small and announce the SHRIMP program, short for SHort-Range Independent Microrobotic Platforms.
Let the “teenylympics” begin!
Enter the Micro-Bots! The SHRIMP Challenge Requirements
The SHRIMP program focuses intensely on what's referred to as SWaP-constrained robotics where SWaP stands for Size, Weight, and Power. This means that they're setting specific requirements for all three of these verticals.How small do these robots need to be to enter the SHRIMP Olympics? In order to be considered, they'll need to measure in the millimeter-to-centimeter range.
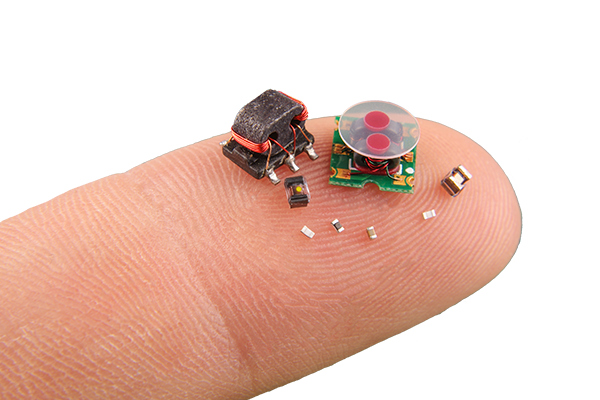
Small components will be key to microrobotics
Once accepted into the competition, teThe challenges presented by DARPA are not just aimed at making small robots; they are aimed at individual parts such as actuators and power supplies. This will allow teams to focus on individual tasks that would otherwise be harder to solve when expecting to also solve other problems in a complete robot design.
The challenges are separated into three technical areas:
- Technical Area 1 (TA1): Actuator technologies to increase force generation, efficiency, strength-to-weight ratio, and maximum work density
- Technical Area 2 (TA2): Power storage devices and power conversion circuitry to maximize sustained operating power for high-voltage actuation mechanisms
- Technical Area 3 (TA3): Untethered mobility, stability, control, maneuverability, and dexterity
For TA2, the second phase of the power challenge is to have a power source provide up to 100mW for at least on hour at a voltage of 1.2 to 3.7V. This challenge is aimed at solving the issue with current power sources which can either deliver a large amount of power or provide power for a long time.
The Tiniest Olympics
So why are these challenges referred to as "Olympic-style" in the official DARPA announcement?If you're excited for tiny robotic athletes, you likely won't be disappointed. Some of the individual challenges will reflect the original DRC's trials with events such as
- High Jump: An actuator must be able to jump into the air and then land without damaging itself. It is expected that the jump height should be at least 5cm
- Long Jump: Just like the high jump, the actuator needs to be able to jump from its starting distance without damage and the expected long jump should be 5cm as well.
- Lifting: An actuator needs to be able to lift progressively heavier masses with the expected lifting mass of 10g
- Shotput: The actuator needs to be able to launch a mass (5g ~ 10g), at least 5cm away horizontally
Those are big challenges for little bots.
Prizes and Timelines
DARPA anticipates awarding around $32 million in prizes, spread across the technical areas. This includes $9-$12 million for TA1, $4-$6 million for TA2, and $10-$14 million for TA3.The timeline is similar to that of the DRC, spanning several years to allow time for entrants to test and iterate their designs.

General timeline of the SHRIMP program
If you're interested in joining this competition, you have until August 10th to submit your abstract!




No comments:
Post a Comment