


An Introduction to Robots
Robot is machine that looks like human
beings. That has been programmed to do some thing. The word Robot comes
from the Slavic word robota (meaning forced laborer). The robot was
developed in 1960’s.Robots are made of metals and mixer of other
elements. Robots just do command and what humans say. Thirty years ago
robots were something in a science fiction movie. But today robotics is
used in many areas. And it is very important to the future of mankind.
The robotic technologies
are improve to helping national defense, health care, manufacturing,
homeland security, education, consumer goods and many different sectors.
Already doctors are using robotics in special surgeries. Robots are
important because it performs tasks that dangerous and impossible for
human also to do.
5 Reasons why Robots have been popular
- Speed
- Dangerous environments
- Repetitive Tasks
- Efficiency
- Accuracy
Speed:
Robots may be used because they are
faster than people at carrying out tasks. Robot is really a mechanism
which is controlled by a computer. We know that computers can do
calculation and process data very fast comparing with human beings. Some
robots actually move more quickly carry out a task, such as picking up
and inserting items, faster than human.
Dangerous Environments:
Robots may be used dangerous environment
because they can work in place where a human would be in danger. For
example robot can be designed to with stand greater amount of heat,
radiation, chemical fumes than humans could.
Repetitive Tasks:
Some times robots are not really much
faster than humans, but they are good at simply doing the same job over
and over. This is easy for the robot, because once the robot has been
programmed to do a job once, the same program can run many times to
carry out the job many times. And the robot will not get bored as a
human would.
Efficiency:
Efficiency is all about carrying out tasks without waste. This mean
- Not wasting time
- Not wasting materials
- Not wasting energy
Accuracy:
Accuracy is all about carrying out tasks
very precisely. In a factory manufacturing items, each item has to be
made identically. When items are being assembled, a robot can position
parts within fraction of a millimeter.
Controlling a Robot
A basic Robot or a robotic system
consists of a rigid body which houses the whole circuitry of the robot.
The circuitry consists of sensors which sense any changes in the
environment and feeds this information to the control unit.
Based on the input from the sensors, the
control unit accordingly controls the actuators. Thus the major
operation of the robot lies with the control unit. In some applications,
the Robot is completely automatic, i.e. the control lies within the
device itself and based on some sensor unit, the actuators are
automatically controlled by the control unit. In some applications, the
robot is controlled manually.
Let us see two ways to control a robot manually
- Using a cell phone
- Using a TV remote
Cell Phone Controlled Robotic Vehicle:
When we talk about wireless robot vehicles,
we generally think about RF technology circuits. But this project is
very different. It uses a cell phone to control the motion of the
robotic vehicle. Here we have used DTMF technology to control the
robotic vehicle by using the mobile phone. We used two cell-phones, one
is connected to robot and another is user phone. Communication is
established between these two mobiles and if any key is pressed, that
tone is heard to another end of the cell. This tone is called “dual tone
multi frequency” tone (DTMF).

Cell Phone Controlled Robotic Vehicle
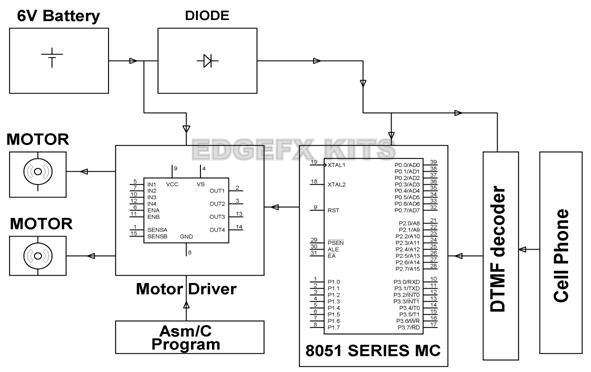
Cell Phone Controlled Robotic Vehicle Circuit Diagram
This project is designed to develop a robotic vehicle
that is controlled by the cell phone. This is based on 8051
microcontroller. The two cell phone controls the robot as per
requirement. One cell phone is connected to the robot and another one is
user cell. When a key pressed on user cell phone that key generates the
corresponding tone, it is received at another cell. The received tone
is processed by the microcontroller with help of the DTMF decoder. The
decoder decodes the DTMF tone into binary digits and these binary coded
data is sent to the microcontroller. Based on the input from the cell
phone, the microcontroller accordingly gives proper signals to the motor
driver to rotate each of the motor in desired direction. For instance,
on pressing a particular number on the user mobile, the call
automatically gets dialed to the system mobile phone. The system mobile
is connected to the DTMF decoder which accordingly decodes the tone and
the motor is rotated in the direction corresponding to the number
pressed.
IR controlled Robotic Vehicle:
In this system mainly a robotic vehicle
is controlled by the TV remote. Infrared (IR) sensor is interfaced to
the robot control unit for sensing the remote signal. This information
is passed on to the control unit which moves the robot as per the
requirement. A microcontroller is utilized as a control system.
In this IR remote goes about as a
transmitter. The point when button is pressed in the remote, the signal
will be passes and gained by the IR receiver. This sign is sent to the
microcontroller which decodes the signal and performs the relating
movement as per the button pressed in the remote. For instance, if
number 1 is pressed in the remote the robot will be turned left as per
our requirement. The other undertakings test (forward, backward and
right) will be performed in the comparative way utilizing IR. At the
receiving end the development is attained by two motors that are
interfaced to the microcontroller.
The program is written i.e., while
executed it sends commands to the motor driver IC as per its requirement
for running the motor for the movement of the robot as explained above.
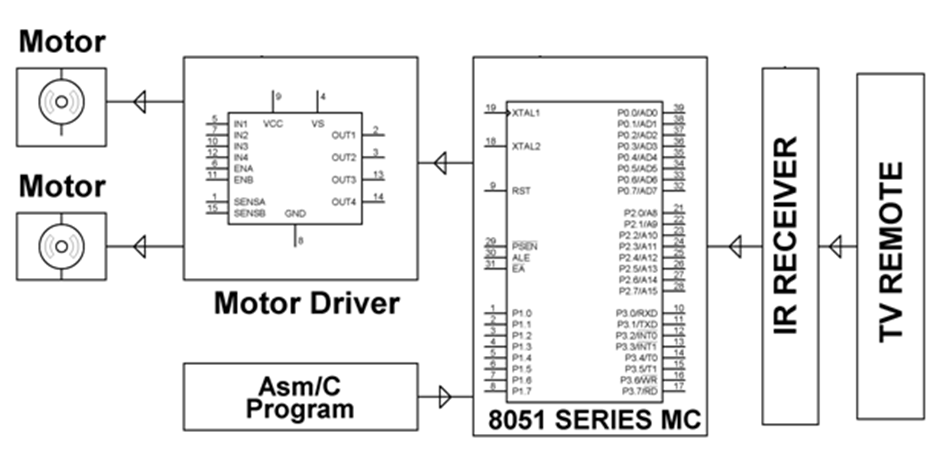
IR controlled Robotic Vehicle Block Diagram
If any doubts regarding this article, please leave a comment. And let me know more application and methods related to this?




No comments:
Post a Comment