



War Field Spying Robot with Night Vision Camera
The spying robot as its name suggests in the one used for the purpose of spying on enemy territories. Its applications can be:
- At the time of war where it can be used to collect information from the enemy terrain and monitor that information at a far secure area, and safely devise a plan for the counter attack.
- Tracking locations of terrorist organizations and then plan attack at suitable time.
- Making a surveillance of any disaster affected area where human beings can’t go.
A Brief Idea about War Field Spying Robot
So let us have a brief idea about how we
can use a robot in war fields for spying purpose. All that is needed is
a wireless camera fitted on the robot circuit which captures images and
videos of enemy territories and transmits these images, which are
received by the receiver unit of the TV.
We can design a simple prototype of a war field spying robot which can controlled remotely and the images transmitted by the camera can be monitored and analyzed on a television.
Hardware Implementation of War Field Spying Robot
All we need to have is the following components to design a war field spying robot apart from a base with wheels and motors.
- Sensor Unit – A wireless Night Vision Camera: Apart from what a basic camera consists of, it consists of a transmitter unit. It captures images and transmits these images through the transmitter in form of digital signals, which are received by the receiver unit connected to the TV or computer. The camera can be as far as 30 miles away from the receiver. A night vision camera can receive illumination either by amplifying the visible light using image intensifiers or using infrared light directly by objects – thermal imaging or infrared light reflected by objects-near infrared illumination.
- A Receiver Unit: The robot also consists of a receiver unit which receives the command signals for controlling the motors and thus the robot unit.
- Actuators: It consists of two DC motors as actuators which provide reverse and forward motion to the robot.
- Control Unit: It consists of a remote transmitter unit consisting of microcontroller, encoder and a RF module and a receiver unit embedded on the circuit consisting of an RF receiver module, a microcontroller and a decoder.
How a War field Spying Robot Night Vision Camera Works?
The wireless night vision camera
embedded on the robot consists of a wireless transmitter. A cluster of
IR LEDs are placed which are used to provide IR light to the image
sources. The reason IR light is preferred is because at night time, it
is usually dark and since any camera needs light for illumination, infra
red light is the most preferred option as all objects emit a range of
Infra red light. The camera is powered with a 12 V battery and captures
these images and transmits them to the receiver unit connected to a
Television unit. The images are converted to digital signals by the
transmitter unit and the receiver unit receives these digital signals
and reconverts them to images and these images or videos are then
monitored and analyzed on a Television unit.
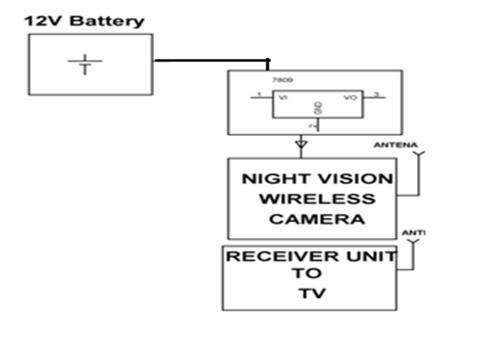
Block Diagram Showing Basic Working of the Robot with Night Vision Camera
Controlling the War Field Spying Robot
The entire control of the robot is done
remotely. It consists of a transmitter section which transmits the
required information to the receiver section. The Robot is simply
covered by pressing few buttons at the transmitter side.
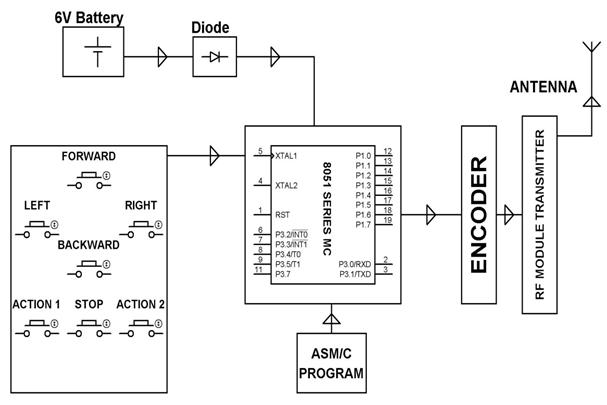
Block Diagram Showing Transmitter of War Field Spying Robot
The transmitter unit consists of an
encoder which receives parallel data input from the microcontroller
through the push buttons and transmits this parallel data in serial
format through the RF module. On pressing the respective push button,
Microcontroller is programmed to send relevant signals to the Encoder in
parallel form. The encoder converts these parallel signals to serial
form to be transmitted by the RF module. This serial data is modulated
with a carrier signal using a RF transmitter and is transmitter. For
example if we press the left button, the microcontroller sends the
command to the receiver unit through the encoder and the RF module.
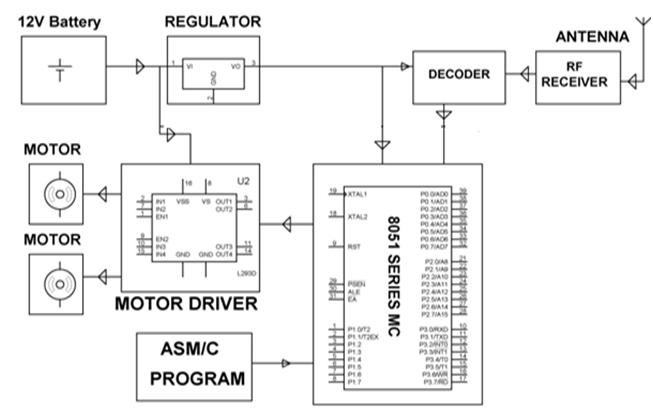
Block Diagram Showing Receiver of War Field Spying Robot
The receiver unit consists of a RF
receiver module which demodulates the received signal and a decoder
which receives the serial data through the RF receiver module and
converts it into parallel form. The Microcontroller uses this data to
give appropriate control signal to the motor driver IC to control the
operation of the two motors. Thus the robot can be moved forward or in
reverse direction by controlling the motor, while the camera does its
work simultaneously.
Robots in Military
Now that we had a brief idea about war field robot, let us have a brief recall about practical robots in defense.
One of the basic features of robots used
in military operations is that they are not completely automatic. They
are actually controlled remotely by human beings. The robots or unmanned
machines as they are termed, can be any moving object or a flying aero
plane fitted with all necessary equipments like sensors, LIDARS (Laser
based Communication RADARS), cameras etc. Their operations can be from
disposing bombs, to surveying enemy territories.
There are 3 kinds of unmanned machines used in the military operations:
- Unmanned Ground Vehicle (UGV): They are used for ground purposes. They can carry heavy load, move on uneven terrains and have various sensors and cameras fitted on them.

Gladiator Tactical UGV
- Unmanned Aerial Vehicle (UAV): They are used to carry aerial weapons and are basically flying machines.

MQ-9 Reaper Unmanned Aerial Vehicle
- Unmanned Underwater Vehicle (UUV): They are basically submarines or machines which can survey under water.

Talisman UUV
Now that we have got a knowledge of the war field robot, lets get into the task of knowing about use of robotic in our country’s military operations and how our defense organization is progressing in this field?
Photo Credits:
- Gladiator Tactical UGV by wikimedia
- MQ-9 Reaper Unmanned Aerial Vehicle by wikimedia
- Talisman UUV by engineersgarage




No comments:
Post a Comment