


Usually, remote control robots use RF
circuits, which have the drawbacks of limited working range, limited
control and limited frequency range. To overcome these drawbacks,cell phone operated land rover robotic
vehicle is used. It provides the advantages of robotic control,
intrusion free controllers and up to twelve controlling systems, etc.
Although the capabilities and appearance of embedded robotics vary
vastly, all robots share the features of a movable, mechanical
structure under some form of control. The control of robots involves
three different phases they are perception, processing and action.
Normally, the sensors are mounted on the robot. The perception and
processing is done by the on-board microcontroller, and the action is
performed using motors.
Cell Phone Operated Land Rover Robotic Vehicle
Cell phone Operated Land Rover Robotic Vehicle
The main intention of this project is to
control a robotic arm which is mounted on a robotic vehicle by using a
mobile phone. It provides a large working range and robust control etc.
Block Diagram of Cell Phone Operated Land Rover Robotic Vehicle:
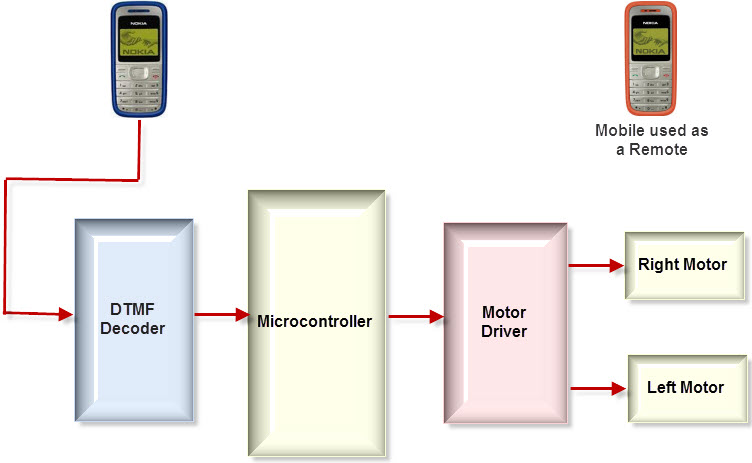
Block Diagram of Cell phone Operated Land Rover
The major building blocks are
microcontroller, Cellphone, DTMF Decoder and DC-Motor-driver circuit.
The cellphone is the most important part of the entire system because
the entire system works and is activated by the cellphone. DTMF (dual tone multi frequency) receives the input signal from cell phone and decode it, and then generates 4-bit-digital output of the 8051 microcontroller. When the DTMF decoder gives a digital output , it also generates an interrupt every time.
The microcontroller is the heart of the
entire system as it performs the entire controlling actions.
Microcontroller depends upon the code which is generated by the DTMF
decoder to move the rover right or left and forward or backward by
rotating both DC motors. The DC motor driver receives activating signals
from the microcontroller in terms of low or high logic, then it
amplifies and rotates two motors in both directions.
The control of robot involves mainly
four different phases: perception, action processing and detection. In
the perception stage if the cellphone attached to the robot receives a
call, then the pressing action of the key on the cellphone decodes the
generated DTMF tone. Then, the decoder chip receives the audio signal
from the cellphone, and then converts the DTMF tone into a binary code,
which is then fed to the microcontroller. In this project, an MT88710 IC
is used as a DTMF decoder. In the processing stage, the microcontroller
processes the binary code which is received from the DTMF decoder. The Microcontroller is preprogrammed in ‘C’ to perform this particular task according to the input bits.
On the action stage, the rotation of the
motors depends upon the input given by the microcontroller. Two DC
motors each of 30 RPM are used for the landrover and are driven by the
motor-driver IC. On detection the stage, and for obstacle detection, an infrared transmitter and receiver are
used along with the buzzer. When the obstacle comes in front of the
robot, the IR transmitter transmits the IR rays on the object, then the
object reflects the IR rays to the IR receiver. The IR receiver then
receives the IR rays to activate the buzzer.
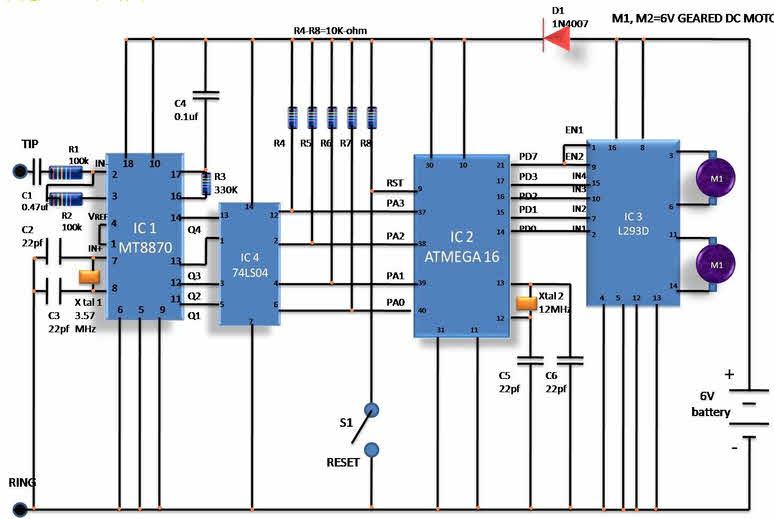
Circuit Diagram of Cell phone operated land rover Robotic Vehicle:
The main components of this
cellphone-operated robotic landrover are microcontroller, motor driver
and DTMF decoder. An MT8870 series DTMF decoder is used in this project
which uses digital counting techniques to detect the 16 DTMF tone pairs
into a 4-bit code output. The built- in dialtone circuit eliminates
prefiltering. If an input signal is given at the pin2, then the input
configuration is recognized to be effective. The 4-bit-decode signal of
the DTMF tone is transferred to the pin11 through the pin 14’s output.
These pins are connected to the microcontroller pins Pao, Pa1, Pa2 and
Pa3. The output of the microcontroller from port pins PD0 through PD3
and PD7 are fed to the inputs IN1, IN4 and enables the pins EN1, EN2 of
the motor-driver L293D IC to drive the two DC motors.
Circuit Diagram of Cell phone Operated Land Rover
In this circuit, S1 switch is used for
manual reset. The output of the microcontroller is not enough to drive
the DC motors, so current drivers are necessary for motor rotation.The
L293D motor driver is designed to provide bidirectional drive currents
of up to 600 mA at voltages from 4.5V to 36V, which makes it easier to
drive the DC motors. The L293D motor driver consists of four drivers.
The pins IN1 through IN4 & OUT1 and OUT4 are the input and output
pins of the driver 1 through driver 4. The drivers 1,2,3 and 4 are
enabled by the enable pin1(EN1) and the pin 9 (EN2). When enable input
EN1 (pin1) is high, the drivers 1 and 2 are enabled. Similarly, the
enable input EN2 (pin9) enables the drivers 3.
Advantages and Disadvantages:
The advantages of
cellphone-operated-robotic landrover include wireless controlling
provisioning and surveillance system, 3G-technology-based vehicle
navigation, and limitless operational range based on the network of the
cellphone. The disadvantage include: the cost as the cellphone billing
is high; mobile batteries discharge :
the discharging problem associated with the batteries as the batteries
loss charge due to quick discharge because the load is high;
adaptability: the system is not adaptable to all cellphones, but the
ones with the headset attached can only be used.
Thus, this Cellphone-operated robot
project is very useful in military applications to control military
vehicles by using a mobile phone. In future, we can detect the position
of enemies by arranging a wireless camera to
the land rover robotic vehicle. This project can also be helpful in
academics as students can learn various terminologies and principles
proposed in this project. This project will help students add their
innovative thoughts and ideas to develop robotics projects.




No comments:
Post a Comment