


A robot is an electro-mechanical machine
that is directed by a circuitry or a computer program.Robots have
exchanged humans in the aid of performing continuous and dangerous tasks
which humans choose not to do. Present robots are classified into different categories
based on their features and performance like industrial robots,
commercial robots, service robots, mobile robots. Here is a service
robot which performs the continuous tasks to welcome the people by a
hand movement representing “Namaste” through a recorded voice message.
Generally, when we invite people to home, parties, marriage functions,
office, etc. We need to arrange a person to greet and invite them at the
entrance. If the amount of the people is low, then the task is simpler.
But if you greet hundreds of people, then the task is difficult. To
overcome this problem, here is a project, namely namaste robot with
voice control.

Namaste Robot
Namaste Robot with Voice Control
The main concept of this Namaste robot project is to control the various servo motors
through an Arduino board. This robot scans the surrounding people and
rotates its head around by 180°. If it recognizes anyone nearby, then it
wishes that person with Namaste with both the hands pressing together.
It is the traditional way of wishing people in India. The applications of robots involve in shopping malls, parks, offices to attract the people.
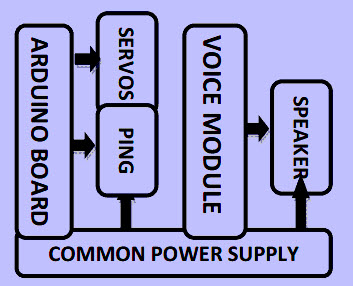
Block Diagram of Namastae Robot with Voice Control
The following figure signifies the block
diagram of the Namaste robot with voice controlled. In this kind of
robot, voice commands are programmed. The entire development board can
be connected to the common power supply. The description of each and
every block is as follows. The power supply gives the power supply to all the modules. These modules require current in mA and operating voltage will be 5V.
Block Diagram of Namastae Robot with Voice Control
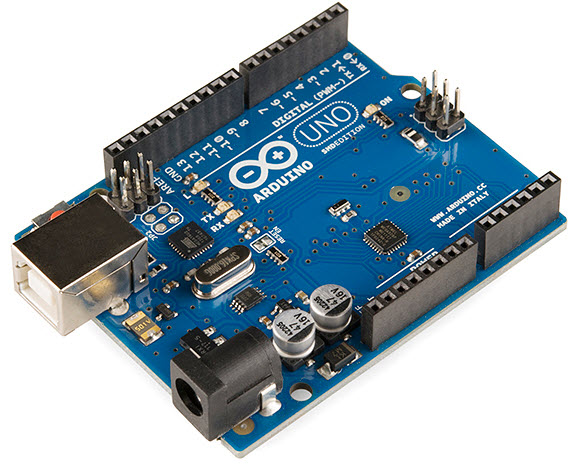
Arduino Board
Arduino is a one kind of tool
based on a simple microcontroller board used to control and sense the
physical world than a desktop computer. For physical computing there are
various microcontroller platforms are available. The important features
of an Arduino are inexpensive, open source & extensible
software.The Arduino software is available as open source tool and the
language can be extended through C++ libraries.
Arduino Board
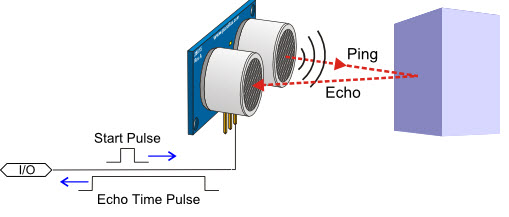
Ping Sensor
The ping sensor uses SONAR to control the distance of an object in its vicinity. This sensor is used as the
eyes of the robot to sense the obstacle.For instance, proximity sensor.
It gives an excellent range accuracy and stable readings. The operation
of this sensor is not affected by black material or sunlight. The
specifications of the ping sensor are voltage is 5V, current is 15mA,
sensor angle is NOT>=15 and detection distance is 2 cm~450 cm.
Ping Sensor
The interfacing of ping sensor with an
Arduino is shown below. There are four pins are available to interface
he ping sensor with an Arduino board. The four pins on the Arduino board
are GND, VCC, ECHO and TRIGGER. The pins on the board are D0-D13, in
that 12 and 13 pins are input and output pins.
Arduino microcontroller offers us with a
servo control library that lets us switch servos with ease. In this
project we used 5 servos to regulate the movements of the Namaste robot
like head, right elbow, left elbow, right shoulder and left shoulder.
Here, the digital input/output pins (D5, D6, D9, D10, D1) pins signify
in the Arduino board interfaced to servo motors.
Voice Playback IC
This voice playback IC offers the
recorded message that plays at the predefined frequency rate. The
playback is moved to the audio amplification unit.

Voice Playback IC
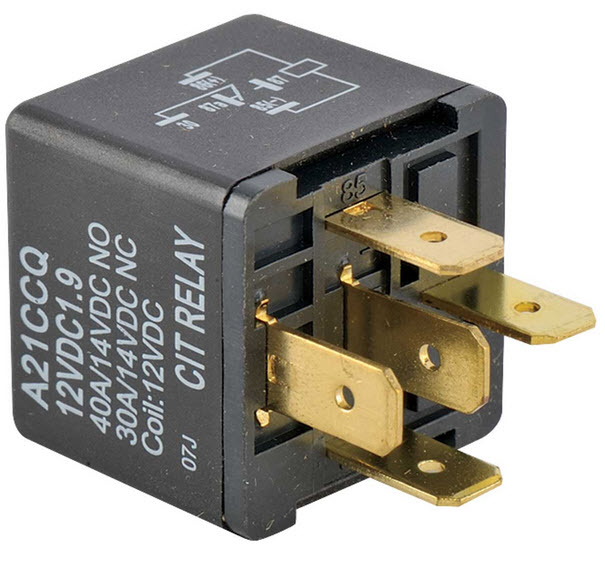
Relay
A relay is a one kind of switch
operates electrically. The flow of current through the coil of the
relay makes a magnetic field which invites a lever & changes the
switch contacts.
Relay
Voice Control Namastae Robot Working
The working of the Namaste robot can be
done in a step by step procedure along with the simulated results. When
the Namaste robot is in a first state, then the servo motors
of the robot 2, 3, 4, 5 are in OFF state or zero state. The head of the
Namaste robot alternates from center to right, left and then to back to
center due to spin of Servo motor1 from 0°-180°. The movement of the
robot’s head specifies that the Namaste robot is looking for an
obstacle. When the ping sensor detects any obstacle, the head position
of the robot returns to the center and Servo motor1 relics at 90° angle
and switched OFF. It is activated in a LOW state.
When the servo motor1 gets switched OFF
then the remaining motors like servo4 and servo5 switches ON. The signal
line is triggered for the right and left shoulders of the Namaste
robot. Now the hands of a robot can make movement up. The shoulder servo
motors are interfaced to the digital input and output pins of the
Arduino board. But, signal lines or these pins will be high and the
position of the servo is changed to 90°. Now the servo4 and servo 5
turns OFF.
Finally we can conclude that, the main aim of this voice control robot is to provide the service
of welcoming people politely by detecting people walking in front of
it. It can be used in various public places like parks, shopping malls,
parties, etc. We hope that you have got a better understanding of this
concept. Furthermore, any queries regarding this concept or arduino
based robot projects, please give your valuable suggestions by commenting in the comment section below.
Photo Credits:
- Arduino Board nyacknewsandviews
- Ping Sensor parallax
- Voice Playback IC kealab
- Relay awdirect
- Namaste Robot canstockphoto




No comments:
Post a Comment