


Nowadays, robotics are becoming one of the most advanced in the field of technology. The applications of robotics mainly involve in automobiles, medical, construction, defense and also used as a fire fighting robot
to help the people from the fire accident. But, controlling the robot
with a remote or a switch is quite complicated. So, a new project is
developed that is, an accelerometer based gesture control robot. The
main goal of this project is to control the movement of the robot with
hand gesture using accelerometer.

Accelerometer based Gesture Control Robot
Accelerometer based Gesture Control Robot
This project includes transmitter section and receiver section. The required components to
build this project are Ht12e, Ht12d, L293D, AT89S52, 7805, capacitor,
crystal, PBT connector, single pole antenna, resistor, LED,
accelerometer and battery.The accelerometer is an essential device in
this project.
accelerometer or transmitter device
depends upon the hand gesture. Through transmitter device, a command is
received and it is processed with the help of At89S51 microcontroller.
This microcontroller gives
signal to the robot to move in the preferred direction. The basic
working principle of this robot set of the data signals of transmitting
device readings to the microcontroller fitted in the robot. The
preprogrammed microcontroller runs according to the program, which make
the robot work accordingly.
A gesture controlled robot using an
accelerometer is one kind of robot which can be operated by the movement
of hand by placing an accelerometer on it. This project is divided into
two parts transmitter device and receiver device. Where a gesture
device works as a transmitter device and a robot works as a receiver
device.When a transmitting device (accelerometer) is placed on the hand,
then it will send signals to the robot for the required operation.
The major components used in the transmitting section include an accelerometer, comparator, HT12E IC encoder and RF transmitter.
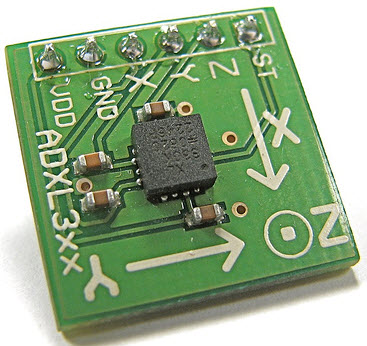
Accelerometer
An accelerometer is a one type of sensor
and it gives an analog data while moving in the direction of X, Y and
Z. These directions depend on the type of sensor. The diagram of
accelerometer is shown below. This sensor consists of arrow directions,
if we tilt the sensor in one direction, then the data at the particular
pin will change in the form of analog. The accelerometer consists of six
pins, where the function of each pin is discussed below.
Accelerometer
- Pin-1: VDD pin is used to give +5V supply to this pin
- Pin-2: GND pin is connected to the ground for the purpose of biasing
- Pin-3: X pin will receive the data in the X direction
- Pin-4: Y pin will receive the data in the Y direction
- Pin-5: Z pin will receive the data in the Z direction
- Pin-6: ST pin is used to adjust the sensitivity of the accelerometer 1.5g or 2g or 3g or 4g
Comparator
The comparator is used to change the
analog voltage into digital voltage and compares that analog voltage to a
reference voltage and give a precise low voltage or high voltage
Encoder
This encoder is used to encode the 4-bit data and transmits by using an RF transmitter module.
RF Transmitter Module
The RF TX module works with 433MHz frequency and this module is easily available in the market with low cost
The major components used in the receiving section include receiver, decoder, microcontroller and motor driver.
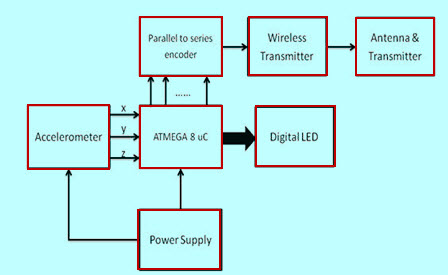
Transmitter Section
RF Receiver
The RF receiver of this project will receive the data which is transferred by the transmitting device.
Decoder
The decoder is used to change the serial data into parallel data which is received from the RF receiver module.
Microcontroller
The microcontroller is the most essential part of the robot. A 8051 family microcontroller is used in the circuit to give a decision capacity
Motor Driver
The motor driver is a device which gives
the movement to do a task like a motor. So we require motor driver to
run them through the controller. The interface between motor &
microcontroller can be done using an L293D motor driver IC in this
circuit.
At the receiver section, an RF receiver
module receives the data from the transmitter. The received data can be
decoded by an IC HT12D. The received data can be processed by AT89S51
microcontroller and motor driver is used to control the motor.
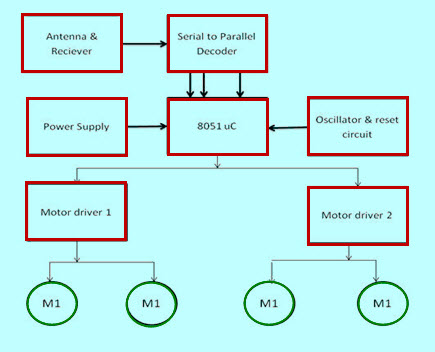
Receiver Section
Gesture Control Robot Working
Accelerometer based gesture controlled
robot moves according to the movement of hand as we place the
accelerometer on your hand. When we tilt hand with an accelerometer in
front of the robot, then the robot starts moving forward until the next
movement is given. When we tilt hand in backward direction, then the
robot changes its direction and state. Then it starts moving in backward
direction until the next signal is given. When we tilt hand on left
side, then the robot moves into left side until the next signal is
given.In the same way, when we tilt hand in right side, then the robot
moves right side.
Applications
The applications of the accelerometer based gesture controlled robot include
- These robots are used in military applications to operate robots
- These robots are used in medical applications for the purpose of surgery
- These robotics are used in the construction field
- These robotics are used in industries to control trolly and lift.
Thus, this is all about Accelerometer
based gesture control robot, its working and applications.We hope that
you have got a better understanding of this concept. Furthermore, any
doubts regarding this concept or electronics projects,
please give your feedback by commenting in the comment section below.
Here is a question for you, what are the applications of accelerometer
based gesture control robot?
Photo Credits:
- Accelerometer based Gesture Control Robot ytimg
- Accelerometer static.flickr




No comments:
Post a Comment