


Interfacing is one of the important concepts in microcontroller 8051
because the microcontroller is a CPU that can perform some operation on
a data and gives the output. However to perform the operation we need
an input device to enter the data and in turn output device displays the
results of the operation. Here we are using keyboard and LCD display as
input and output devices along with the microcontroller.
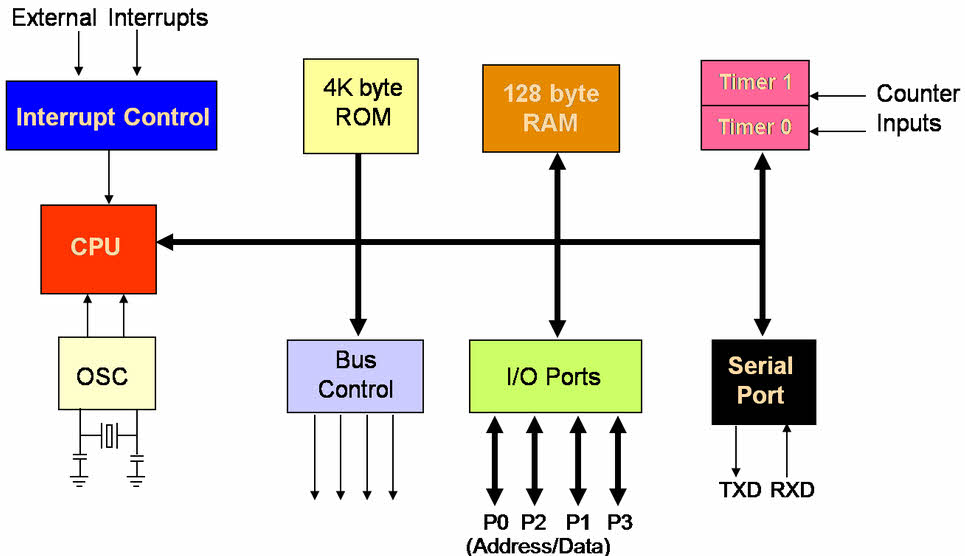
Microcontroller 8051 Peripheral devices
Interfacing
is the process of connecting devices together so that they can exchange
the information and that proves to be easier to write the programs.
There are different type of input and output devices as for our
requirement such as LEDs, LCDs, 7segment, keypad, motors and other
devices.
Here is given some important modules interfaced with microcontroller 8051.
1. LED Interfacing to Microcontroller:
Description:
LEDs are most commonly used in many
applications for indicating the output. They find huge range of
applications as indicators during test to check the validity of results
at different stages. They are very cheap and easily available in a
variety of shape, color and size.
Light Emitting Diode
The principle of operation of LEDs
is very easy. A simple LEDs also servers as a basic display devices, it
On and OFF state express meaning full information about a device. The
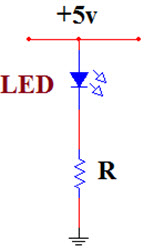
common available LEDs have a 1.7v voltage drop that means when we apply
above 1.7V, the diode conducts. The diode needs 10mA current to glow
with full intensity.
The following circuit describes “how to glow the LEDs”.
LEDs can be interfaced to the
microcontroller in either common anode or common cathode configuration.
Here the LEDs are connected in common anode configuration because the
common cathode configuration consumes more power.
Circuit Diagram
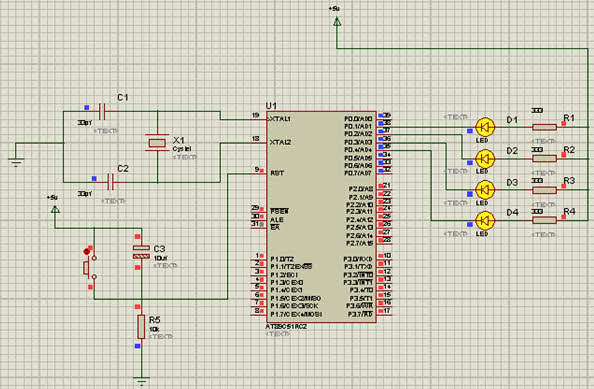
LED Interfacing to Microcontroller.
Source code:
#include
void main()
{
unsigned int i;
while(1)
{
P0=0x00;
for(i=0;i<30000 br="" i=""> P0=0xff;
for(i=0;i<30000 br="" i=""> }
}
void main()
{
unsigned int i;
while(1)
{
P0=0x00;
for(i=0;i<30000 br="" i=""> P0=0xff;
for(i=0;i<30000 br="" i=""> }
}
2. 7-Segment Display interfacing circuit
Description:
A Seven segment display is the most basic electronic display. It consists of eight LEDs which are associated in a sequence manner so as to display digits from 0 to 9 when proper combinations of LEDs are switched on. A 7-segment display uses seven LEDs to display digits from 0 to 9 and the 8th LED is used for dot. A typical seven segment looks likes as shown in figure below.
A Seven segment display is the most basic electronic display. It consists of eight LEDs which are associated in a sequence manner so as to display digits from 0 to 9 when proper combinations of LEDs are switched on. A 7-segment display uses seven LEDs to display digits from 0 to 9 and the 8th LED is used for dot. A typical seven segment looks likes as shown in figure below.
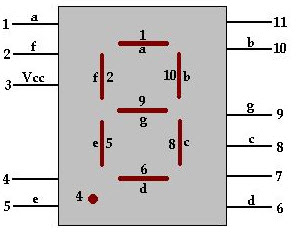
7-Segment Display
The 7-segment displays are used in a
number of systems to display the numeric information. They can display
one digit at a time. Thus the number of segments used depends on the
number of digits to display. Here the digits 0 to 9 are displayed
continuously at a predefined time delay.
The 7-segment displays are available in
two configurations which are common anode and common cathode. Here
common anode configuration is used because output current of the
microcontroller is not sufficient enough to drive the LEDs. The
7-segment display works on negative logic, we have to provide logic 0 to
the corresponding pin to make on LED glow.
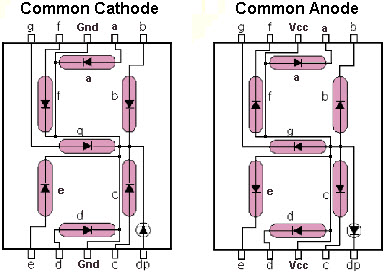
7-Segment Display Configurations
The following table shows the hex values used to display the different digits.
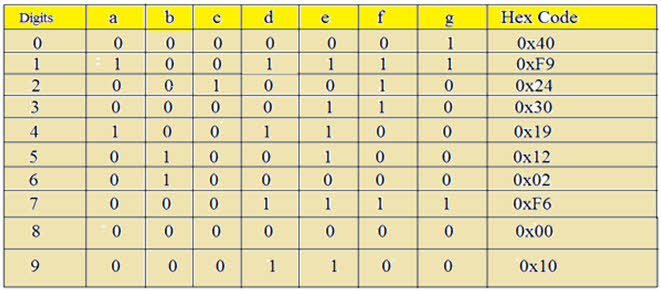
7-Segment Display Table
Circuit Diagram
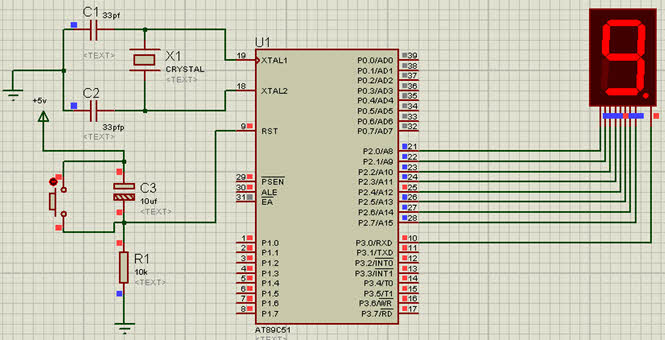
7-Segment Display interfacing
Source Code:
#include
sbit a= P3^0;
void main()
{
unsigned char n[10]= {0x40,0xF9,0x24,0x30,0x19,0x12,0x02,0xF8,0xE00,0x10};
unsigned int i,j;
a=1;
while(1)
{
for(i=0;i<10 br="" i=""> {
P2=n[i];
for(j=0;j<60000 br="" j=""> }
}
}
sbit a= P3^0;
void main()
{
unsigned char n[10]= {0x40,0xF9,0x24,0x30,0x19,0x12,0x02,0xF8,0xE00,0x10};
unsigned int i,j;
a=1;
while(1)
{
for(i=0;i<10 br="" i=""> {
P2=n[i];
for(j=0;j<60000 br="" j=""> }
}
}
3. LCD Interfacing to Microcontroller
LCD stands for liquid crystal display
which can display the characters per line. Here 16 by 2 LCD display can
display 16 characters per line and there are 2 lines. In this LCD each
character is displayed in 5*7 pixel matrix.
LCD Display
LCD is very important device which is used for almost all automated devices such as washing machines, an autonomous robot, power control systems
and other devices. This is achieved by displaying their status on small
display modules like 7-seven segment displays, multi segment LEDs etc.
The reasons being, LCDs are reasonably priced, easily programmable and
they have a no limitations of displaying special characters.
It consists of two registers such as command/instruction register and data register.
The command/instruction register stores
the command instructions given to the LCD. A command is an instruction
which is given to the LCD that perform a set of predefined tasks like
initializing, clearing the screen, setting the cursor posing,
controlling display etc.
The data register stores the data to be
displayed on LCD. The data is an ASCII value of the characters to be
displayed on the LCD.
Operation of LCD is controlled by two
commands. When RS=0, R/W=1 it reads the data and when RS=1, R/W=0, it
writes (print) the data.
LCD uses following command codes:
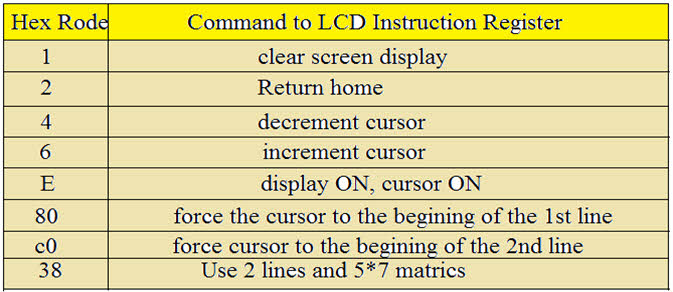
LCD Display Commands
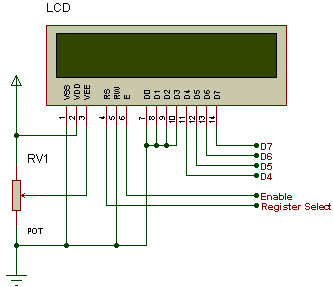
Circuit Diagram:
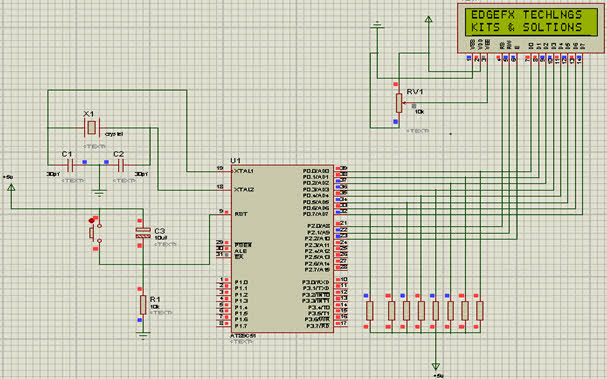
LCD Interfacing to Microcontroller
Source code:
#include
#define kam P0
#define kam P0
sbit rs= P2^0;
sbit rw= P2^1;
sbit en= P2^2;
sbit rw= P2^1;
sbit en= P2^2;
void lcd_initi();
void lcd_dat(unsigned char );
void lcd_cmd (unsigned char );
void delay(unsigned int );
void display(unsigned char *s, unsigned char r);
void main()
{
void lcd_dat(unsigned char );
void lcd_cmd (unsigned char );
void delay(unsigned int );
void display(unsigned char *s, unsigned char r);
void main()
{
lcd_initi();
lcd_cmd(0x80);
delay(100);
display(“EDGEFX TECHLNGS”, 15);
lcd_cmd(0xc0);
display(“KITS & SOLTIONS”,15);
while(1);
}
lcd_cmd(0x80);
delay(100);
display(“EDGEFX TECHLNGS”, 15);
lcd_cmd(0xc0);
display(“KITS & SOLTIONS”,15);
while(1);
}
void display(unsigned char *s, unsigned char r)
{
unsigned int w;
for(w=0;w
{
{
unsigned int w;
for(w=0;w
lcd_dat(s[w]);
}
}
}
}
void lcd_initi()
{
lcd_cmd(0x01);
delay(100);
lcd_cmd(0x38);
delay(100);
lcd_cmd(0x06);
delay(100);
lcd_cmd(0x0c);
delay(100);
}
void lcd_dat(unsigned char dat)
{
kam = dat;
rs=1;
rw=0;
{
lcd_cmd(0x01);
delay(100);
lcd_cmd(0x38);
delay(100);
lcd_cmd(0x06);
delay(100);
lcd_cmd(0x0c);
delay(100);
}
void lcd_dat(unsigned char dat)
{
kam = dat;
rs=1;
rw=0;
en=1;
delay(100);
en=0;
}
void lcd_cmd(unsigned char cmd)
{
kam=cmd;
rs=0;
rw=0;
delay(100);
en=0;
}
void lcd_cmd(unsigned char cmd)
{
kam=cmd;
rs=0;
rw=0;
en=1;
delay(100);
en=0;
}
void delay( unsigned int n)
{
delay(100);
en=0;
}
void delay( unsigned int n)
{
unsigned int a;
for(a=0;a
}
for(a=0;a
4. Stepper motor interfacing circuit
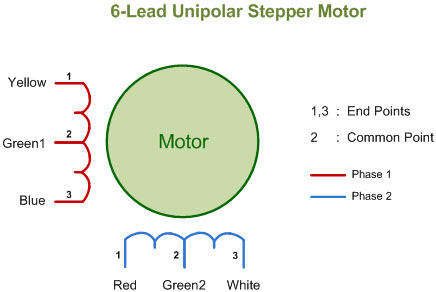
Unipolar Stepper Motor
A stepper motor
is one of the most commonly used motor for precise angular movement.
The advantage of using a stepper motor is that the angular position of
the motor can be controlled without any feedback mechanism. The stepper
motors are widely used in industrial and commercial applications. They
are also commonly used as in drive systems such as robots, washing
machines etc.
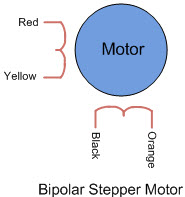
Bipolar Stepper Motor
Stepper motors can be unipolar or
bipolar and here we are using unipolar stepper motor. The unipolar
stepper motor consists of six wires out of which four are connected to
coil of the motor and two are common wires. Each common wire is
connected to a voltage source and remaining wires are connected to the
microcontroller.
Circuit Diagram:
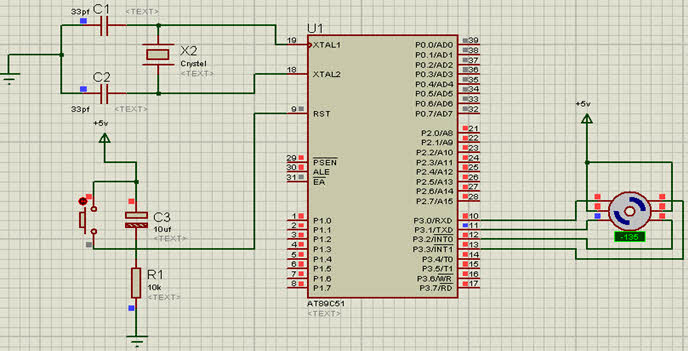
Stepper motor interfacing circuit
Source code:
#include
sbit a=P3^0;
sbit b=P3^1;
sbit c=P3^2;
sbit d=P3^3;
sbit a=P3^0;
sbit b=P3^1;
sbit c=P3^2;
sbit d=P3^3;
void delay();
void main()
{
{
while(1)
{
{
a=0;
b=1;
c=1;
d=1;
delay();
a=1;
b=0;
c=1;
d=1;
delay();
a=1;
b=1;
c=0;
d=1;
delay();
a=1;
b=1;
c=1;
d=0;
b=1;
c=1;
d=1;
delay();
a=1;
b=0;
c=1;
d=1;
delay();
a=1;
b=1;
c=0;
d=1;
delay();
a=1;
b=1;
c=1;
d=0;
}
}
}
void delay()
{
{
unsigned char i,j,k;
for(i=0;i<6 br="" i=""> for(j=0;j<255 br="" j=""> for(k=0;k<255 k="" p="">

for(i=0;i<6 br="" i=""> for(j=0;j<255 br="" j=""> for(k=0;k<255 k="" p="">
}
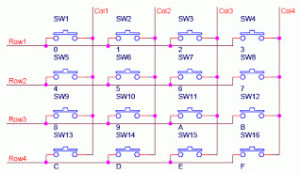
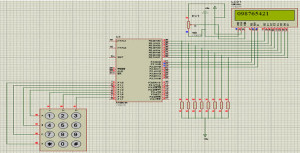
5. Matrix keypad interfacing to 8051
Description:

Matrix Keypad
Keypad is a widely used input device
with lot of applications such as telephone, computer, ATM, electronic
lock etc. A keypad is used to take input from the user for further
processing. Here a 4 by 3 matrix keypad consisting of switches arranged
in rows and columns is interfaced to the microcontroller. A 16 by 2 LCD is also interfaced for displaying the output.
The interfacing concept of keypad is
very simple. Every number of keypad is assigned two unique parameters
that are row and column (R, C). Hence every time a key is pressed the
number is identifying by detecting the row and column numbers of keypad.
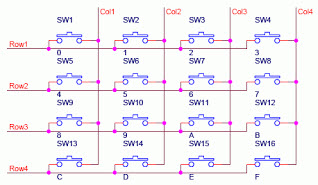
Keypad Internal Diagram
Initially all the rows are set to zero
(‘0’) by the controller and columns are scanned to check if any key is
pressed. In case of no key is pressed the output of all columns will be
high (‘1’).
Circuit Diagram
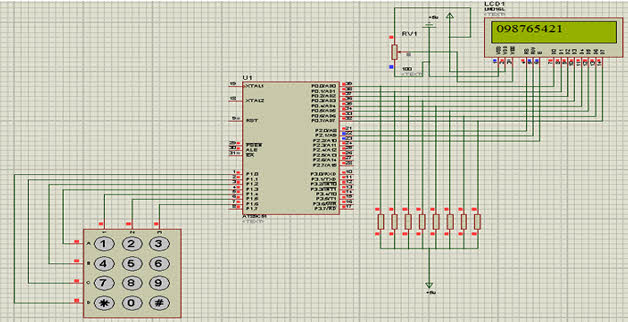
Matrix keypad interfacing to 8051
Source Code:
#include
#define kam P0
sbit rs=P2^0;
sbit rw=P2^1;
sbit en=P2^2;
sbit c1=P1^4;
sbit c2=P1^5;
sbit c3=P1^6;
sbit r1=P1^0;
sbit r2=P1^1;
sbit r3=P1^2;
sbit r4=P1^3;
void lcd_initi();
void lcd_dat(unsigned char );
void lcd_cmd (unsigned char );
void delay(unsigned int );
void display(unsigned char *s, unsigned char r);
#define kam P0
sbit rs=P2^0;
sbit rw=P2^1;
sbit en=P2^2;
sbit c1=P1^4;
sbit c2=P1^5;
sbit c3=P1^6;
sbit r1=P1^0;
sbit r2=P1^1;
sbit r3=P1^2;
sbit r4=P1^3;
void lcd_initi();
void lcd_dat(unsigned char );
void lcd_cmd (unsigned char );
void delay(unsigned int );
void display(unsigned char *s, unsigned char r);
void main()
{
lcd_initi();
lcd_cmd(0x80);
delay(100);
display(“0987654321”, 10);
while(1);
}
{
lcd_initi();
lcd_cmd(0x80);
delay(100);
display(“0987654321”, 10);
while(1);
}
void display(unsigned char *s, unsigned char r)
{
{
unsigned int w;
for(w=0;w
{
for(w=0;w
lcd_dat(s[w]);
}
}
void lcd_initi()
{
lcd_cmd(0x01);
delay(100);
lcd_cmd(0x38);
delay(100);
lcd_cmd(0x06);
delay(100);
lcd_cmd(0x0c);
delay(100);
}
}
}
void lcd_initi()
{
lcd_cmd(0x01);
delay(100);
lcd_cmd(0x38);
delay(100);
lcd_cmd(0x06);
delay(100);
lcd_cmd(0x0c);
delay(100);
}
void lcd_dat(unsigned char dat)
{
kam = dat;
rs=1;
rw=0;
{
kam = dat;
rs=1;
rw=0;
en=1;
delay(100);
en=0;
}
void lcd_cmd(unsigned char cmd)
{
kam=cmd;
rs=0;
rw=0;
delay(100);
en=0;
}
void lcd_cmd(unsigned char cmd)
{
kam=cmd;
rs=0;
rw=0;
en=1;
delay(100);
en=0;
delay(100);
en=0;
}
void delay( unsigned int n)
{
void delay( unsigned int n)
{
unsigned int a;
for(a=0;a
}
}
for(a=0;a
}
We hope we have been able to provide ample knowledge about the basic yet important interfacing circuits of microcontroller 8051.
These are the most basic circuits required in any embedded system
application and we hope we have provided you with a good revision.
A further query or feedback related to this topic is welcome to be mentioned in the comment section below.




No comments:
Post a Comment