


A brief introduction to a robot:
A Robot is any machine which is
completely automatic, i.e. it starts on its own, decides its own way of
work and stops on its own. It is actually a replica of human being,
which has been designed to ease human burden. It can be controlled
pneumatically or using hydraulic ways or using the simple electronic
control ways. The first industrial robot was Unimates built by George
Devol and Joe Engelberger in the late 50’s and early 60’s.
Any robot is built on 3 basic laws defined by the Russian Science fiction author Isaac Asimov:
- A robot should not harm the human being directly or indirectly.
- A robot should obey human orders unless and until it violates the first law.
- A robot should protect its own existence provided the 1st two laws are not violated.

A Fixed Robot
Robots can be fixed robots or mobile
robots. Mobile Robots are robots with a mobile base which makes the
robot move freely in the environment. One of the advanced mobile robots
is the Line Follower Robot. It is basically a robot which follows a
particular path or trajectory and decides its own course of action which
interacts with obstacle. The path can be a black line on the white
floor (visible) or a magnetic field (invisible). Its applications start
from basic domestic uses to industrial uses, etc. The present condition
in industry is they are carrying the parcels or materials one place to
another place using the crane system. Some times lifting of big weights
at that time may cause the breakage of lifting materials and will be
cause damage to the parcels also. The line following robots is commonly
used for carry children through shopping malls, homes, entertainment
places, industries. The use of line following robotic vehicle
is transport the materials from one place to another place in the
industries. This robot movement completely depends on the track. The
robot can do any thing you set them to do. Like in factories all they
have to do with making their products is make the robot.
A mobile robot
Line follower robot
A line follower robot is a robot which follows a certain path controlled by a feed back mechanism.
Building a basic line follower robot:
Building a basic Line Follower Robot involves the following steps.
- Designing the mechanical part or the body of the robot
- Defining the kinematics of the robots
- Designing the control of the robot
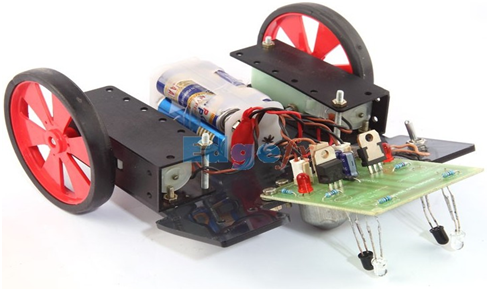
A Line Follower Robot
The mechanical part or body of the robot
can be designed using AutoCAD or Workspace. A basic Line follower robot
can consist of a base at the two ends of which the wheels are mounted. A
rectangular sheet of hard plastic can be used as the base. Further a
rigid body like a cylinder can be added along with other shaped bodies
inter connected with each other by joints, and each with its defined
motion in particular direction. The Line follower robot can be a
wheeled mobile robot with a fixed base, a legged mobile robot with
multiple rigid bodies interconnected by joints.
The next step involves defining the
Kinematics of the robot. Kinematic analysis of the robot involves the
description of its motion with respect to a fixed coordinate system. It
is concerned mainly with the movement of the robot and with motion of
each body in case of a legged robot. It generally involves the dynamics
of the robot motion. The whole trajectory of the robot is set using the
Kinematic analysis. This can be done using Workspace software.
The control of the robot is the most
important aspect of its working. Here the term control refers to the
robot motion control, i.e. controlling the movement of the wheels. A
basic line follower robot follows certain path and the motion of the
robot along this path is controlled by controlling the rotation of
wheels, which are placed on the shafts of the two motors. So, the basic
control is achieved by controlling the motors. The control circuitry
involves the use of sensors to sense the path and the microcontroller or any other device to control the motor operation through the motor drivers, based on the sensor output.
2 Ways of controlling a line Follower Robot
- Without using Microcontrollers
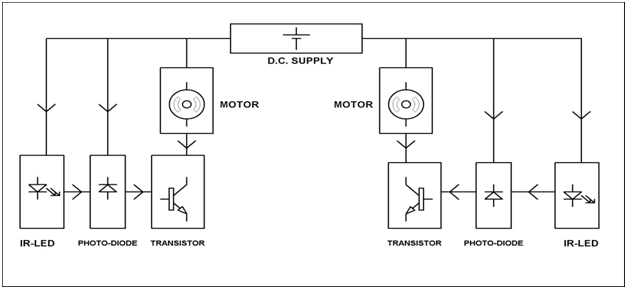
Block Diagram of the control System
It consists of an IR-LED and Photodiode
arrangement for each motor which is controlled by the switching on and
off of the transistor.
The IR LED on getting proper biasing
emits Infra red light. This IR light is reflected in case of a white
surface and the reflected IR light is incident on the photodiode. The
resistance of the photodiode decreases, which leads to an increase in
current through it and thus the voltage drop across it. The photodiode
is connected to the base of the transistor and as a result of increased
voltage across the photodiode, the transistor starts conducting and thus
the motor connected to the collector of the transistor gets enough
supply to start rotating. In case of a black color on the path
encountered by one of the sensor arrangement, the IR light is not
reflected and the photodiode offers more resistance, causing the
transistor to stop conduction and eventually the motor stops rotating.
Thus the whole system can be controlled using a simple LED-Photodiode-Transistor arrangement.
- With using Microcontrollers
Working principle:
The line fallowing robot is one of the
self-operating robots. That detects and fallows a line drawn on the
area. The line is indicated by white line on a block surface or block
line on a white surface. This system must be sense by the line. This
application is depends upon the sensors. Here we are using two sensors
for path detection purpose. That is proximity sensor and IR sensor. The
proximity sensor used for path detection and IR sensor used for obstacle
detection. These sensors mounted at front end of the robot. The
microcontroller is an intelligent device the whole circuit is controlled
by the microcontroller.
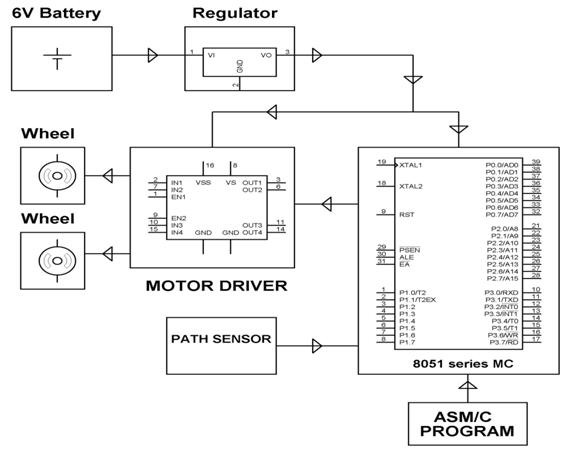
Block Diagram of Line Following Robotic Vehicle with Microcontroller
Different types of line controlled robotic vehicles:
There are two types of line controlled robotic vehicles
- Mobile based line controlled robotic vehicle
- RF based line controlled robotic vehicle
Applications of line follower robot:
- Industrial Applications: These robots can be used as automated equipment carriers in industries replacing traditional conveyer belts.
- Automobile applications: These robots can also be used as automatic cars running on roads with embedded magnets.
- Domestic applications: These can also be used at homes for domestic purposes like floor cleaning etc.
- Guidance applications: These can be used in public places like shopping malls, museums etc to provide path guidance.
Advantages:
- Robot movement is automatic
- It is used for long distance applications
- Simplicity of building
- Fit and forget system
- Used in home, industrial automations etc.




No comments:
Post a Comment