


Robots are automatic electro-mechanical
devices resembling humans or animals that are controlled by an
electronic circuitry or computer program. There are different types of
robots that are used for different types of applications.
Recent trends in robotic technology have been developing advanced
robots such as surgical robots are remote manipulators that are used for
surgeries (especially keyhole surgery), walking robots that are mostly
multi legged that are capable to move by walking, microbots and nanobots
are microscopic and these nano robots
or nano devices that are used in the human body to cure diseases, the
rovers are robots with wheels that are used to walk on other planets for
space exploration. Typically, robots used in space applications are autonomous robots, modular reconfigurable robots or self-reconfigurable modular robots, and so on.
Modular Reconfigurable Robots
Modular reconfigurable robots are
generally autonomous kinematic devices with adjustable morphology. In
fixed-morphology robots only the conventional tasks such as actuation,
sensing and controlling are only able to perform. But,
self-reconfigurable robots or modular reconfigurable robots are capable
to change their own shapes by reorganizing their parts connectivity such
that for adapting new circumstances, performing new tasks, and to
recover from damages.

Modular Reconfigurable Robots
These self-reconfigurable robots can be
defined as robots that can change their shape based on the path they
have to pass through. For example, if a robot has to pass through a
narrow pipe, then it will reconfigure itself in the shape of a worm and
if it has to cross an uneven terrain, then it will reconfigure its shape
with spider like legs. If there is a flat terrain, then it will
reconfigure itself as a ball like structure for quick movement.
These reconfigurable robots are again
classified into two types based on design. Such as homogeneous modular
robotic systems consists of several modules
with similar design to form a structure such that to perform a required
task. A heterogeneous modular robotic system consists of several
modules with different designs each of which performs specific functions
and these are used to form a structure that performs a required task.
Reconfigurable Robots in Space Applications
As a part of research over the other
planets, many countries are frequently launching several satellites or
space missions to study the conditions and characteristics of the
planets. Thus, for obtaining long term data, long term space missions
are being launched and these long term space missions are typically
self-reconfigurable systems.
These self-reconfigurable robots are
capable of handling unforeseen situations and self-repair in case of any
damages. We know that space missions are huge and mass constrained, so
it is beneficiary if we use self-configurable robots that can perform
multiple tasks instead of multiple robots that each perform only one particular task.

Robots Used in Space Applications
Till date, humans have set foot other
than planet earth is only the moon. Whereas, modular robots used in
space applications are being launched on many other planets. A series of
landers, manipulators, orbiters, and rovers sent to Mars are famous
robots used in space applications.
Robotic Manipulators and Rovers
There are various types of tasks that
are performed by articulated robots in space. The process of servicing
the apparatus or equipment in space is called as space manipulation
which is done by articulated robots. Polybot suits well for space
station or satellite maintenance and inspection. Robotic manipulators
are projected for positioning in space or on other planets for emulating
human manipulation abilities. They are generally positioned on
free-flyer spacecraft or on orbit tuning of other spacecraft, within
space vehicles, planetary landers, and rovers for acquiring samples.

Robot Manipulator
Robotic rovers are projected for
positioning on planets for emulating human movement abilities. They are
frequently positioned on the terrestrial planets surfaces, small solar systems, aerobots (planetary atmospheres), cydrobots (ice layers), and hydrobots (liquid layers).
Automated Design and Optimization
Modular reconfigurable robots or modular
robotic system is combined with software tools for assisting to select
and design the finest morphology and control structure for performing
each particular task. Although many traits of this design will
unavoidably depend on human intelligence for the predictable future,
other traits are acquiescent for automated design and optimization. All
reconfigurable robots used in space applications must be designed such
that capable to survive with launch stresses, radiation in the space,
the vacuum, planetary distribution, and environment of the planet
(planet on which reconfigurable robots are used or on target planets).
There are two types of designs of reconfigurable robots and they are: Lattice based designs and Chain based designs.
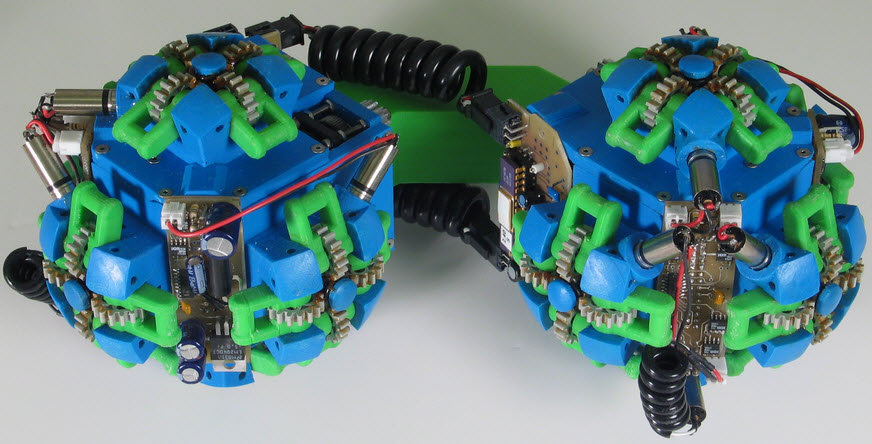
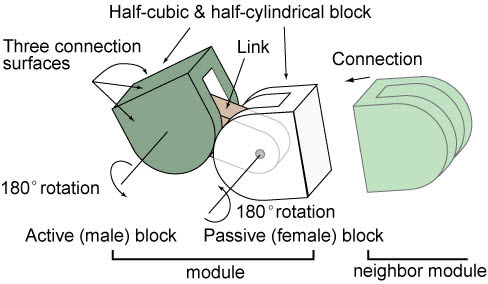
Lattice Based Designs of Male Reconfigurable Robot
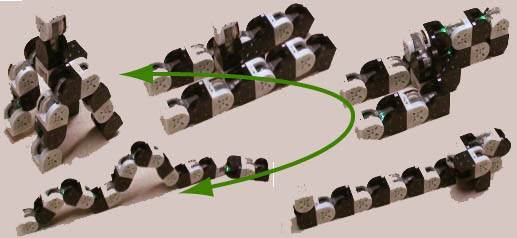
Chain Based Designs of Reconfigurable Robot
Modular Reconfigurable Robot Simulation
A software simulation environment based
on physics, was developed using C++ that facilitates users for
constructing reconfigurable robots utilizing a various types of modules.
Additional module types are added with compatible connectors for
extending the simulation.
Practical Example of Self-Reconfigurable Modular Robot
Modular Transformer Module
Modular transformer is one of the
frequently used reconfigurable robots and these M-TRAN modules are used
to form 3-D structure (that can change its own configuration and also
capable to generate small robots), multi-DOF robot (that flexibly
locomotes), and metamorphosing robot. This modular transformer consists
of two actuators and battery.
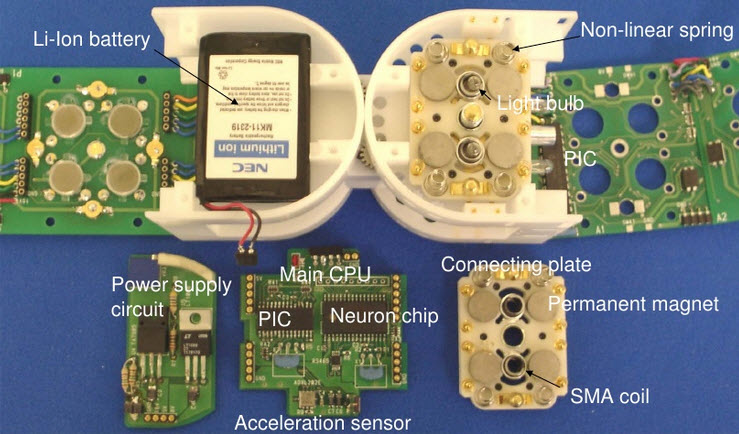
Internal Diagram of M-TRAN Module
These reconfigurable robots are used in
space applications for achieving the specific goals such as
telecommunication provision, observation over earth for data return,
military feasibility, and navigation purposes.
There are many other robotic based projects and applications:
- Ultrasonic Obstacle Sensed Robotic Vehicle
- Robotic Vehicle Movement by Cell Phone
- Robotic Vehicle Operated by a TV Remote
- Track Sensing Robotic Vehicle Movement
- Fire Fighting Robot
- Voice Controlled Robotic Vehicle
- Pick N Place Robot Controlled by Android Wirelessly
- Metal Detector Robotic Vehicle
- Auto Metro Train to Shuttle between Stations
- RF Controlled Robotic Vehicle
- Touch Screen Based Remote Controlled Robotic Vehicle
Hope this article gives brief
information about modular reconfigurable robots used in space
applications. For more information regarding robotic based electronics projects you can approach us by posting your queries in the comments section below.
Photo Credits
- Modular Reconfigurable Robots by asmedigitalcollection
- Robots Used in Space Applications by robotnor
- Robot Manipulator by iccrobotics
- Lattice Based Designs of Male Reconfigurable Robot by csail.mit
- Chain Based Designs of Reconfigurable Robot by wikimedia
- Modular Transformer Module by unit.aist
- Internal Diagram of M-TRAN Module by slidesharecdn



No comments:
Post a Comment