


With the development of technologies
especially in robotic technology, robots are predominant in many of the
applications. Some of those are of highly risky type and hazardous
areas. Military and battle field applications are now growing their
usage of robots in some crucial and complicated tasks. In one of my
articles I have described about the use of Robot as a spy in military
operations. Now what if there is a need for the defense of the robotic vehicle
or an attack by the robot? That is where the need for a robot embedded
with an attack mechanism comes. One such example is the robotic vehicle
with LASER gun.
RF Controlled Robotic Vehicle with Laser beam arrangement
Such robot is used basically in military operations and also by traffic police to detect the speed of moving vehicles.
Before going to the details about Robots with Laser gun, let us have quick understanding of LASER as a weapon.
A LASER (Light Amplification by
Simulation Emission) beam is actually a uni-directional strongly focused
light unlike the one from a simple bulb. It consists of synchronized
troughs and crests, i.e. the waves do not interfere with each other.
This produces a strong focused light of very high power of the order of
1000 to 1 million times greater than a typical bulb light. It is device
that controls the emission and absorption of the photons by pumping
sufficient amounts of energy. In this, source of photons are amplified
into a beam of light. The wave length of these lasers are varies into
different spectrum like visible, infrared and ultraviolet.
Principle behind the LASER revolves
around three things; those are absorption, spontaneous emission and
stimulated emission. An adequate amount of energy from the photon is
interacts with the atom, causing the atom to jump from lower energy
state to higher energy state. This atom is fall back to the lower energy
state by emitting a photon called as spontaneous emission. In
stimulated emission is the release of energy from the atom by artificial
means. so the photon interacts with the excited atom, has the same
energy and polarization as the incident photon.
Now let us have a look at the Hardware Parts of the Robot
- Base: The base of such a robot can be any cubical body with wheels attached for its movement.
- DC Motor: The robot consists of two DC motors driven by the motor drivers and provides required motion to the robot.
- Control Unit: The robot motion is controlled using a RF communication module. The transmitter consists of pushbuttons, microcontroller, a decoder and a RF transmitter where as the receiver unit embedded on the robot consists of an encoder and RF receiver module to control the robotic motion.
- A LASER gun: A LASER gun is mounted on the robot which performs the main task of the robot.
A Sneak Peak into the Robot Working
The robot while moving in the required
direction shoots strong light beam from the LASER gun which can either
harm the target or just produce a spot to detect the target. The LASER
needs to be driven by some energy source. In a simple prototype design
using a basic LASER pen, the device is driven by a transistor acting as a
switch. The transistor receives low logic signal from the
microcontroller and is in off condition, making the LASER module
directly connected to the 5 V power supply.
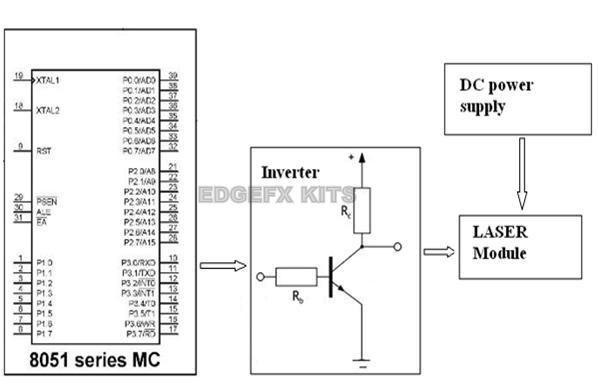 Laser Gun Driven by Transistor Working as an Inverter
Laser Gun Driven by Transistor Working as an Inverter Controlling the Robot
To control the robot motion, the
operation of the motors needs to be controlled. This can be done using
RF controlled operation of the motor drivers. The commands are
transmitted using a RF transmitter at some distance unit about 200
meters and received by the RF receiver to drive the motors.
The transmitter unit consists of several
push buttons which act as command switches to move the robot in any
desired direction. The push buttons are interfaced to the
microcontroller, which is programmed to send data in parallel form based
on the push button input, to the encoder. The encoder converts this
parallel data to serial form and this serial data is transmitted using
the RF transmitter module through an antenna.
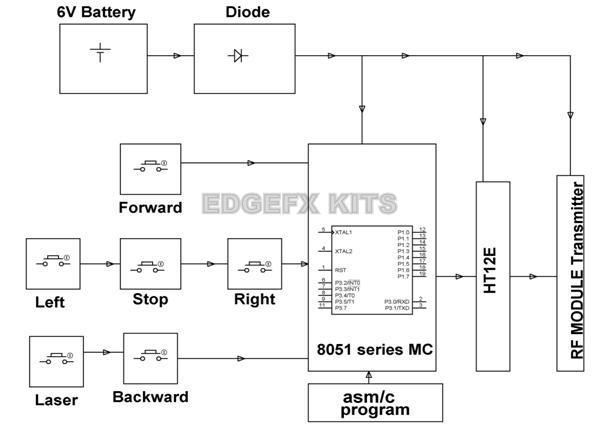
Block Diagram Showing the Transmitter Section
The receiver unit consists of an RF
receiver module which receives the modulated signal and demodulates it.
The decoder receives the demodulated signal in serial form and converts
it into the parallel form. The microcontroller receives the signals and
controls the motor driver accordingly. The motor driver used in LM293D
which can control 2 motors at a time.
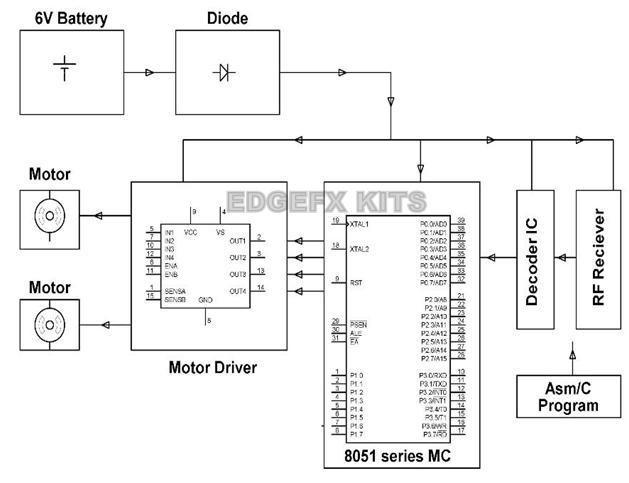
Block Diagram showing Receiver Section
In the above descriptions, I have given a
brief idea about a simple prototype of a Robotic Vehicle with LASER
beam. In real life applications, normally long range communication
system like GSM or DTMF are used to control the robot from remote
places.
3 Applications of Robotic Vehicle with Laser Gun:
- Target Detection: The robotic vehicle can use the LASER beam to cause a spot on the target, such that it is easily visible and can be targeted. An example is the Air Borne LASER.
- Target Destruction: A strong LASER beam of the order of 95GHz frequency can actually cause a burning sensation in the human body as it penetrates the skin by 1/64th of an inch and the beam energy can heat up the water molecules in the body. An example is the Active Denial System developed by USA.
- Target Range Finder and speed detection: The LASER beam from the robotic vehicle can be used to find the range of the target by the principle of LASER light reflection and also speed of the target can be calculated once we can get the range.
So now we have a brief idea about Robots used a target detector and destroyer. Does it have any use for normal public other than just the military? Think and answer.



No comments:
Post a Comment