


Common DC gear head motors need current above 250mA. There are many integrated circuits like ATmega16 Microcontroller, 555 timer IC.
But, IC 74 series cannot supply this amount of current. When the motor
is directly connected to the o/p of the above ICs then, they might
damaged. To overcome this problem, a motor control circuit is required,
which can act as a bridge between the above motors and ICs (integrated circuits). There are various ways of making H-bridge motor control circuit such as using transistor, relays and using L293D/L298.
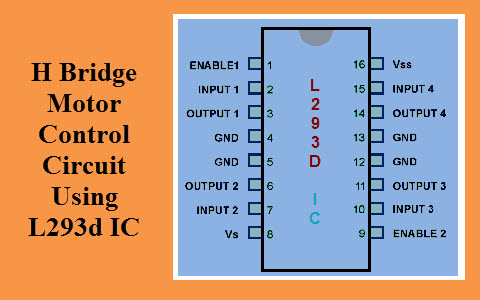
H Bridge Motor Control Circuit Using L293d IC
H-Bridge Circuit
A H bridge is an electronic circuit that
allows a voltage to be applied across a load in any direction. H-bridge
circuits are frequently used in robotics and many other applications to
allow DC motors to run forward & backward. These motor control
circuits are mostly used in different converters like DC-DC, DC-AC,
AC-AC converters and many other types of power electronic converters. In specific, a bipolar stepper motor is always driven by a motor controller having two H-bridges
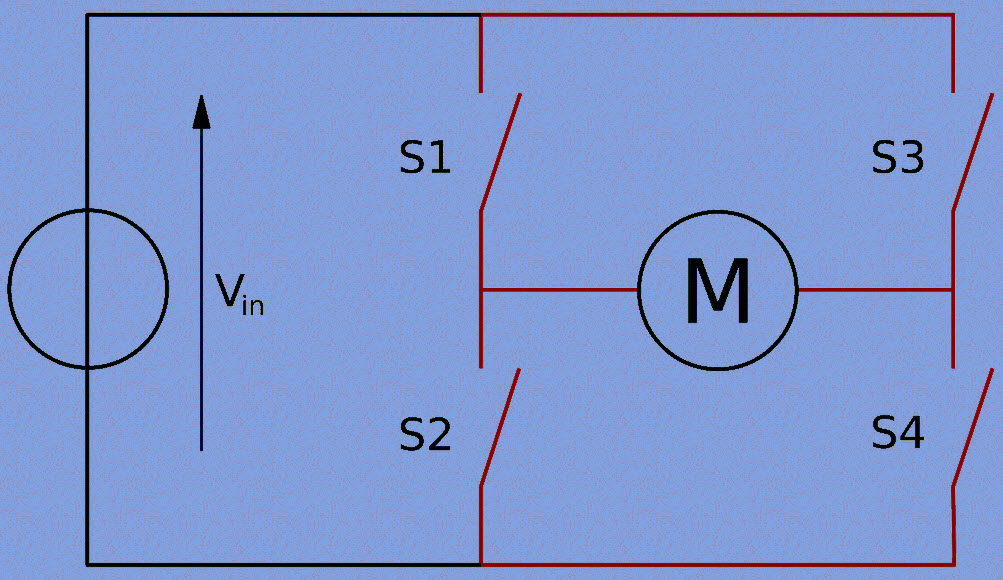
H-Bridge Circuit
A H-bridge is fabricated with four switches
like S1, S2, S3 and S4. When the S1 and S4 switches are closed, then a
+ve voltage will be applied across the motor. By opening the switches S1
and S4 and closing the switches S2 and S3, this voltage is inverted,
allowing invert operation of the motor.
Generally, the H-bridge motor driver
circuit is used to reverse the direction of the motor and also to brake
the motor. When the motor comes to a sudden stop, as the terminals of
the motor’s are shorted. Or let the motor run free to a stop, when the
motor is detached from the circuit. The table below gives the different
operations with the four switches corresponding to the above circuit.
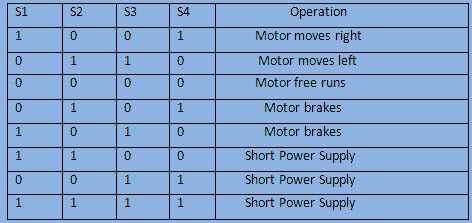
Operation of the H-Bridge
L293D Motor Driver IC
L293D IC is a typical Motor Driver IC which allows the DC motor
to drive on any direction. This IC consists of 16-pins which are used
to control a set of two DC motors instantaneously in any direction. It
means, by using a L293D IC we can control two DC motors. As well, this
IC can drive small and quiet big motors.
This L293D IC works on the basic principle of H-bridge, this motor control
circuit allows the voltage to be flowing in any direction. As we know
that the voltage must be change the direction of being able to rotate
the DC motor in both the directions. Hence, H-bridge circuit using L293D
ICs are perfect for driving a motor. Single L293D IC consists of two
H-bridge circuits inside which can rotate two DC motors separately.
Generally, these circuits are used in robotics due to its size for
controlling DC motors.
Pin Diagram of a L293D Motor Driver IC Controller
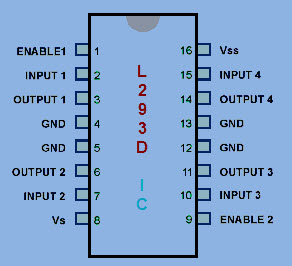
L293D IC Pin Configuration
- Pin-1 (Enable 1-2): When the enable pin is high, then the left part of the IC will work otherwise it won’t work. This pin is also called as a master control pin.
- Pin-2 (Input-1): When the input pin is high, then the flow of current will be through output 1
- Pin-3 (Output-1): This output-1 pin must be connected to one of the terminals of the motor
- Pin4 &5: These pins are ground pins
- Pin-6 (Output-2): This pin must be connected to one of the terminals of the motor.
- Pin-7 (Input-2): When this pin is HIGH then the flow of current will be though output 2
- Pin-8 (Vcc2): This is the voltage pin which is used to supply the voltage to the motor.
- Pin-16 (Vss): This pin is the power source to the integrated circuit.
- Pin-15 (Input-4): When this pin is high, then the flow of current will be through output-4.
- Pin-14 (Output-4): This pin must be connected to one of the terminals of the motor
- Pin-12 & 13: These pins are ground pins
- Pin-11 (Output-3): This pin must be connected to one of the terminals of the motor.
- Pin-10 (Input-3): When this pin is high, then the flow of current will through output-3
- Pin-9 (Enable3-4): When this pin is high, then the right part of the IC will work & when it is low the right part of the IC won’t work. This pin is also called as a master control pin for the right part of the IC.
H Bridge Motor Control Circuit Using L293d IC
The IC LM293D consists of 4-i/p pins
where, pin2 and 7 on the left side of the IC and Pin 10 and 15 on the
right side of the IC. Left input pins on the IC will control the
rotation of a motor. Here, the motor is connected across side and right
i/p for the motor on the right hand side. This motor rotates based on
the i/ps we provided across the input pins as Logic 0 and Logic 1.
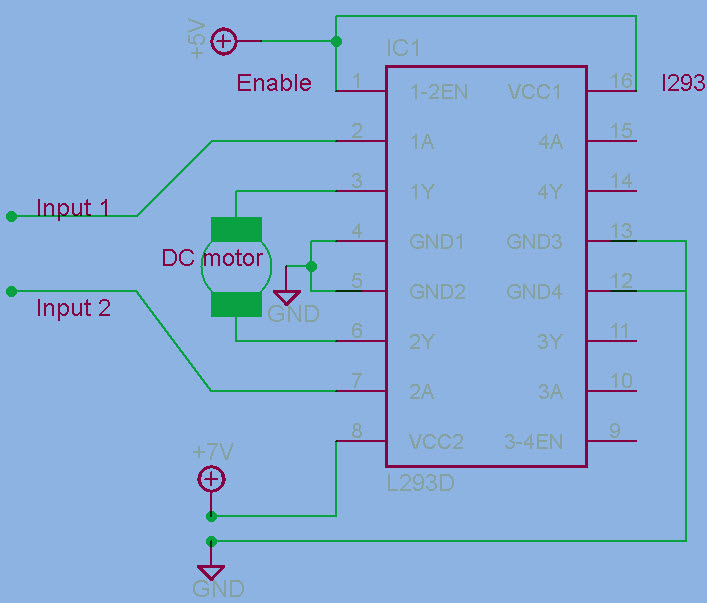
H-bridge Motor Circuit with L293D IC
Let’s consider, when a motor is
connected to the o/p pins 3 and 6 on the left side of the IC. For
rotating of the motor in clockwise direction, then the i/p pins have to
be provided with Logic 0 and Logic 1.
When Pin-2= logic 1 & pin-7 = logic 0, then it rotates in clockwise direction.
Pin-2=logic 0 & Pin7=logic 1, then it rotates in anti clock direction
Pin-2= logic 0 & Pin7=logic 0, then it is idle (high impedance state)
Pin-2= logic 1 & Pin7=logic 1, then it is idle
Pin-2=logic 0 & Pin7=logic 1, then it rotates in anti clock direction
Pin-2= logic 0 & Pin7=logic 0, then it is idle (high impedance state)
Pin-2= logic 1 & Pin7=logic 1, then it is idle
In a similar way the motor can also operate across input pin-15 and pin-10 for the motor on the right hand side.
The L4293D motor driver IC deals with
huge currents, due to this reason, this circuit uses a heat sink to
decrease the heat. Therefore, there are 4-ground pins on the L293D IC.
When we solder these pins on the PCB (printed circuit board), then we
can get a huge metallic area between the ground pins where the heat can
be produced.
This is all about H Bridge Motor Control Circuit
Using L293d IC. These ICs are generally used in robotics. We hope that
you have got a better understanding about the concept of H-bridge.
Furthermore, any queries regarding H bridge motor driver IC l293d or electrical and electronic projects, please give your feedback in the comment section below. Here is a question for you, what is the purpose of moor driver IC?



No comments:
Post a Comment