


An electric machine that converts electrical energy
into mechanical energy is called as an electric motor. First and
foremost electric motor is a simple electrostatic device created by
Scottish monk Andrew Gordon in 1740s. But in 1821, Michael Faraday
demonstrated the conversion of electrical energy into mechanical energy.
Electric motors are primarily classified into two categories: AC motors and DC motors.
Again, each category is subdivided into many types. Many loads such as
mixer, grinder, fans, etc., most frequently used home appliances in
which we can find different types of motors and these can be operated at
different speeds with speed controlling provision of the motors . In
this article, we are going to discuss about one of the major types of DC
motors, namely Stepper motor and its control using microcontroller.
Stepper Motor
A synchronous and brushless DC motor that converts
electric pulses into mechanical movements and thus, rotates stepwise
with a certain angle between each step for completing a full rotation is
called as Stepper Motor. The angle between the steps of rotation of the
stepper motor is termed as the stepper angle of the motor.
Stepper Motor
Stepper motors are classified into two
types according to their winding: Unipolar Stepper Motors and Bipolar
Stepper Motors. The unipolar stepper motor is frequently used in many
applications due to its ease of operation compared to the bipolar
stepper motor. But there are different types of stepper motors such as
Permanent Magnet Stepper Motor, Variable Reluctance Stepper Motor, and
Hybrid Stepper Motor.
Stepper Motor Control
The stepper motor can be controlled with
various techniques, but here we are discussing about the stepper motor
control using an Atmega microcontroller. The 89C51 is a mircocontroller of the 8051 microcontroller family.

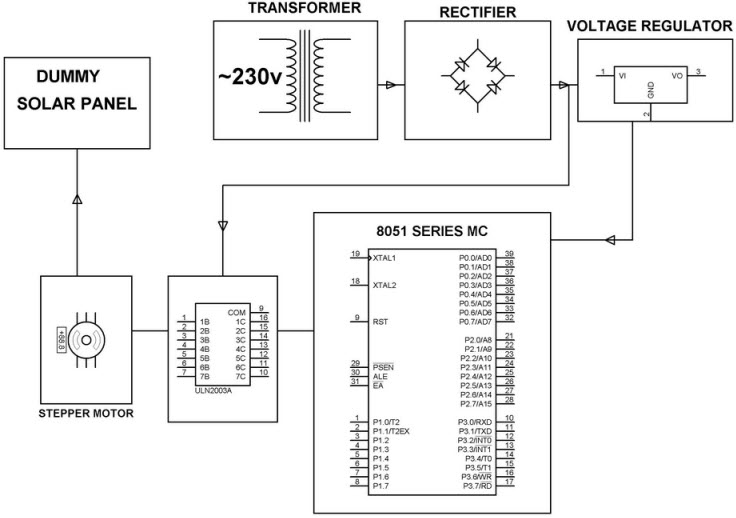
Block Diagram of Stepper Motor Control
The block diagram of a stepper motor control using an 8051 microcontroller is shown in the figure with power supply, microcontroller, stepper motor and control switch blocks.
2 Methods To Design Stepper Motor Control Circuit
The stepper motor controller is designed using 8051 microcontroller and switching circuit for controlling the speed of the stepper motor. The control switch circuit can be designed by using transistor switches or by using stepper motor controller IC such as ULN2003 in place of the transistors.
1. Control Circuit Using Stepper Motor Controller IC
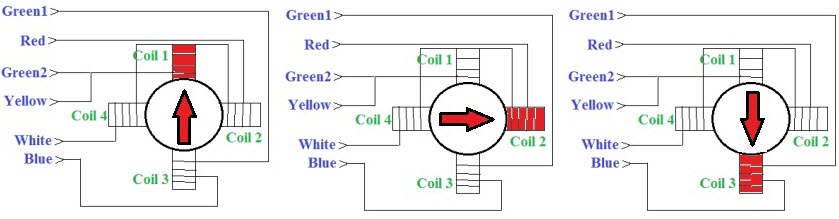
The unipolar stepper motor can be
rotated by energizing the stator coils in a sequence. The sequence of
these voltage signals applied across the motor coils or leads is enough
to drive the motor and hence, no driver circuit is required for
controlling the direction of the current in the stator coils.
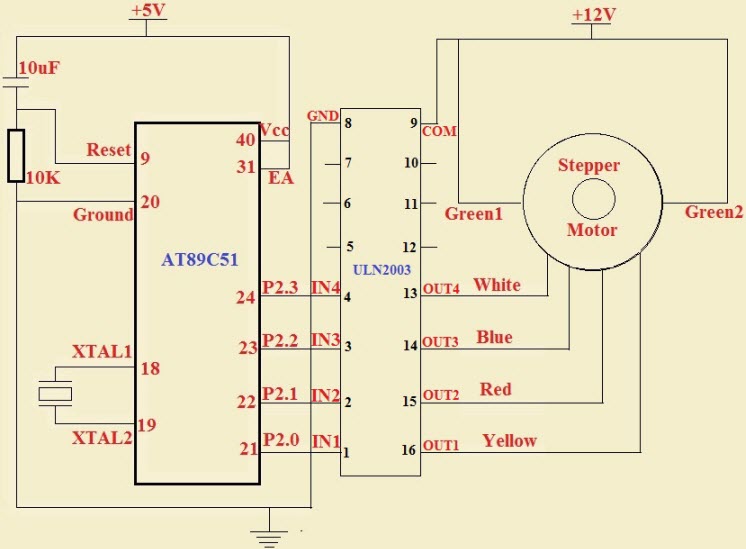
Stepper Motor Control using IC
The two-phase-stepper motor consists of
four end wires connected to the coils and two common wires connected to
the two end leads to form two phases. The common points and end points
of the two phases are connected to the ground or Vcc and the
microcontroller pins, respectively. For rotating the motor, the
endpoints of the two phases are to be energized. Primarily a voltage is
applied to the first end point of the phase1, and further voltage is
applied to the first end point of the phase2, and so on.
The stepper motor can be operated in
different modes such as Wave Drive Stepping Mode, Full Drive Stepping
Mode and Half Drive Stepping Mode.
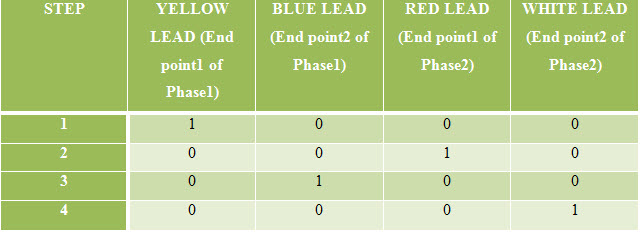
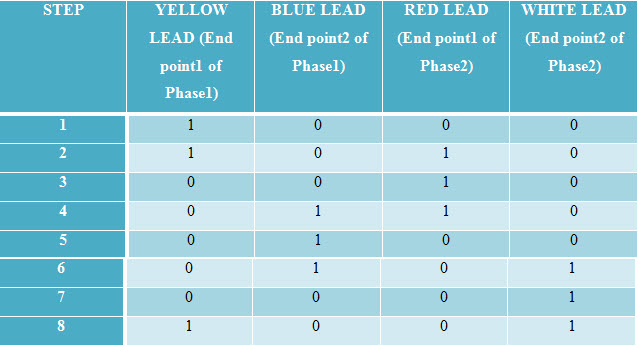
Wave Drive Stepping Mode
By repeating the above sequence, the
motor can be rotated in wave-drive- stepping mode either in a clockwise
or anticlockwise direction based on the selection of end points. The
table below shows the signal phase sequence for wave-drive-stepping
mode.
Wave Drive Stepping Mode
Full Drive Stepping Mode
Energizing the two endpoints of
different phases simultaneously achieves a full-drive-stepping mode. The
table shows the signal phase sequence for full-drive -stepping mode.


Full Drive Stepping Mode
Half Drive Stepping Mode
The combination of the steps of the wave
and full-drive-stepping modes achieves a half-drive-stepping mode.
Thus, in this mode, stepping angle is divided into half. The table shows
the signal phase sequence of a half-drive-stepping mode.
Half Drive Stepping Mode
In general, the stepping angle depends
on the resolution of the stepper motor. The size of thesteps and the
direction of rotation are directly proportional to the number and order
of the input sequence. The rotating speed of the shaft depends on the
frequency of the input sequence. The torque and the number of magnets
magnetized at a time are proportional.
The stepper motor requires 60mA current,
but the maximum current rating of the Atmega microcontroller AT89C51 is
50mA. So, a stepper-motor-controller ICisused to interface the stepper
motor with microcontroller for transferring the signals.
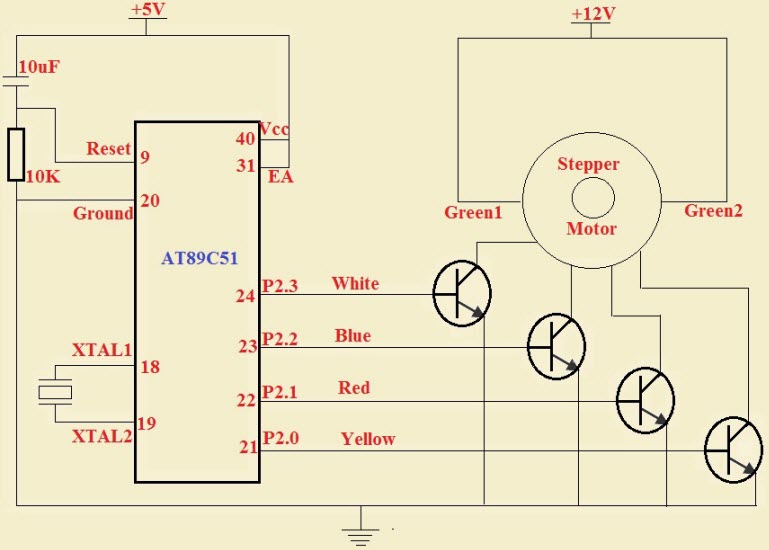
2. Control Switch Circuit Using Transistors
The power supply to the circuit can be
given by stepping down the voltage from 230V to 7.5V using a step-down
transformer, and then rectifying by a bridge rectifier with diodes.
This rectified output is fed to a filter capacitor, and then passed
through the voltage regulator. The 5V regulated output is obtained from
the voltage regulator. The reset pin9 is connected between the capacitor
and resistor.
Stepper Motor Control Circuit using Transistor
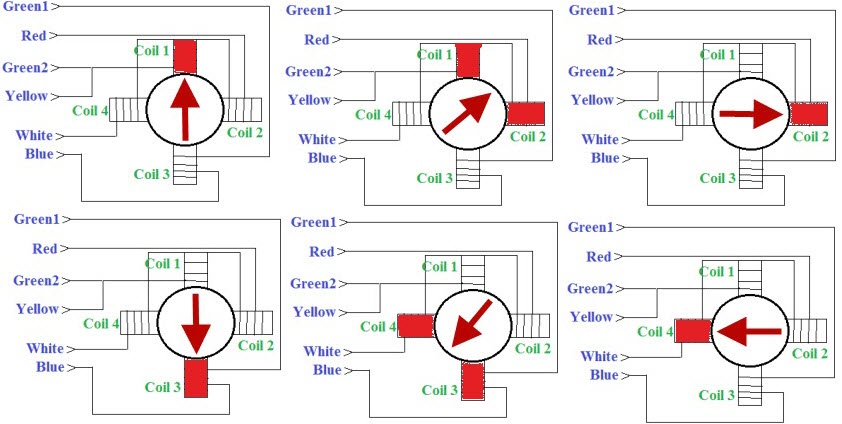
In general, stepper motor consists of
four coils as shown in the figure. So, to drive the motor, four
motor-driver circuits are required. Instead of using the stepper motor
controller IC to drive the motor, four transistors are connected as the
driver circuits at 21, 22, 23 and 24 pins of the microcontroller,
respectively.
If the transistors start conduction,
then a magnetic field will be created around the coil causing rotation
of the motor. The stepper motor speed is directly proportional to the
input pulse frequency. A crystal oscillator is connected to the pins 18
and 19 to provide microcontroller clock frequency of about 11.019MHz.
The execution time of any instruction can be calculated using the below formula
Time=((C*12))/f
Where C= number of the cycleAnd F = crystal frequency
One of the application based circuit that uses stepper motor for rotating solar panel is described below.
Stepper Motor Control Using Programmed 8051 Microcontroller
Sun Tracking Solar Panel project is
intended to generate the maximum amount of energy by automatically
adjusting the solar panel. In this project, a stepper motor controlled
by programmed microcontroller of 8051 family is interfaced to the solar
panel to maintain the solar panels’ face always perpendicular to the
sun.
Stepper Motor Control Using Microcontroller
The programmed microcontroller
generates stepped electrical pulses at regular intervals to the stepper
motor for rotating the solar panel. The driver IC is used to drive the
stepper motor as the controller is unable to provide the power
requirements of the motor.
Please leave your suggestions, feedback
and queries by posting comments in the comment section below. We will do
our best to help you technically regarding this article and developing electrical and electronics projects using stepper motor.



No comments:
Post a Comment