


A pick and place robot is the one which
is used to pick up an object and place it in the desired location. It
can be a cylindrical robot providing movement in horizontal, vertical
and rotational axes, a spherical robot
providing two rotational and one linear movement, an articulate robot
or a scara robot (fixed robots with 3 vertical axes rotary arms).
Advantages
Before moving further, let us see few reasons why pick and place robots are preferred:- They are faster and can get the work done in seconds compared to their human counterparts.
- They are flexible and have the appropriate design.
- They are accurate.
- They increase the safety of the working environment and actually never get tired.
Parts of a Pick N Place Robot
Pick N Place Robot
- A Rover: It is the main body of the robot consisting of several rigid bodies like a cylinder or a sphere, joints and links. It is also known as a manipulator.
- End Effector: It is the body connected to the last joint of the rover which is used for the purpose of gripping or handling objects. It can be an analogy to the arm of a human being.
- Actuators: They are the drivers of the robot. It actually actuates the robot. It can be any motor like servo motor, stepper motor or pneumatic or hydraulic cylinders.
- Sensors: They are used to sense the internal as well as the external state to make sure the robot functions smoothly as a whole. Sensors involve touch sensors, IR sensor etc.
- Controller: It is used to control the actuators based on the sensor feedback and thus control the motion of each and every joint and eventually the movement of the end effector.
Working of a Basic Pick N Place Robot:
The basic function of a pick and place robot
is done by its joints. Joints are analogous to human joints and are
used to join the two consecutive rigid bodies in the robot. They can be
rotary joint or linear joint. To add a joint to any link of a robot, we
need to know about the degrees of freedom and degrees of movement for
that body part. Degrees of freedom implement the linear and rotational
movement of the body and Degrees of movement imply the number of axis
the body can move.
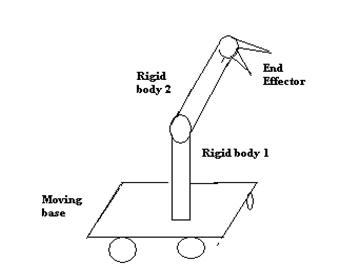
A Simple Pick N Place Robot
A simple pick and place robot consists
of two rigid bodies on a moving base, connected together with rotary
joint. A rotary joint is a one which provides rotation in 360 degrees
around any one of the axes.
- The bottom or the base is attached with wheels which provide linear movement.
- The 1st rigid body is fixed and supports the second rigid body to which the end effector is provided.
- The 2nd rigid body is provided with movement in all 3 axes and has 3 degrees of freedom. It is connected to the 1st body with a rotational joint.
- The end effector should accommodate all 6 degrees of freedom, in order to reach all sides of the component, to take up position to any height.
- The wheels underneath the base help to move the robot to the desired location.
- The rigid body supporting the end effector bends or straightens up to reach the position where the object is placed.
- The end effector picks up the object with a strong grip and places it at the desired position.
Now that we have got a brief idea of the pick and place robot, the basic question is how it is actually controlled.
A simple pick and place robot can be
controlled by controlling the movement of its end effector. The motion
can be using hydraulic motion, i.e. using hydraulic fluid under pressure
to the drive the robot, or using pneumatic motion, i.e. using
pressurized air to cause mechanical motion. However the most effective
way is using motors to provide the required motion. The motors have to
be controlled in order to provide required motion to the robot and the
end effector.
Working Example of Controlling a Pick N Place Robot
How about controlling the robot with a
just a few buttons on the keypad? Yes, it is possible! Just pressing the
required button, we can transmit command to the robot to make it move
in any direction to achieve our task. Moreover this can be achieved
using simple wireless communication.
Let’s see how this actually works:
The transmitter part consists of the
keypad interfaced to the microcontroller. Any button number in decimal
format is converted to 4 digit binary by the microcontroller and the
parallel output at one of its port is applied to the encoder. The
encoder converts this parallel data to serial data and this is fed to
the transmitter, fitted with an antenna to transmit the serial data.
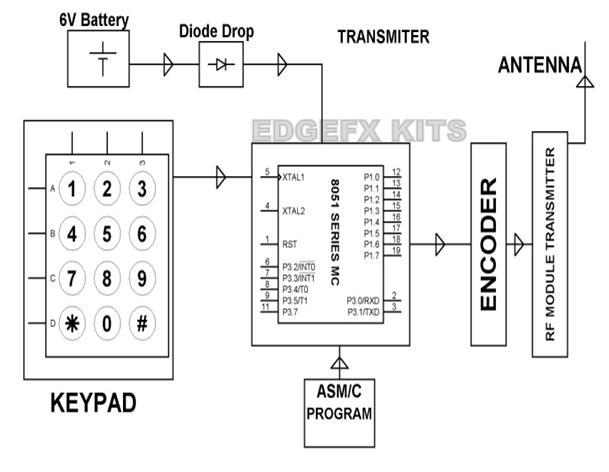
Block Diagram Showing Transmitter of a Pick N Place Robot
The receiver side consists of a decoder
interfaced to the microcontroller. The decoder converts the received
command in serial format to the parallel form and gives this data to the
microcontroller. Based on this command the microcontroller sends the
appropriate input signals to the motor drivers to drive the respective
motors.
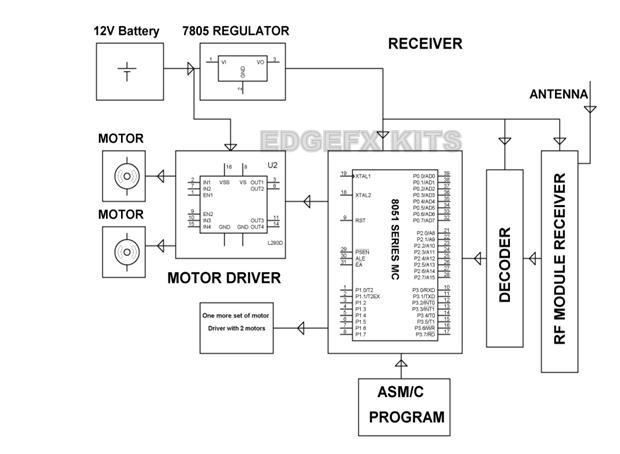
Block Diagram Showing Receiver of a Pick N Place Robot by Edgefx Kits
The system consists of two motors for
providing motion to the whole robot and two other motors to provide the
arm motion. The end effector or the gripper needs to be controlled to
apply proper pressure on the object to handle it effectly, to give it a soft grip.
This is ensured by controlling the arm motors through proper command.
The output from the arm motors is connected to a 10Ohms/2W resistor and
at the time of motor over load or locked condition, a high voltage is
developed across the resistor, which causes a logic high level at the
output of the optoisolator and the interrupt pin of the microcontroller
connected to the optoisolator output through a pnp transistor gets logic
low signal, which halts all other operations of the gripper.
Thus through simple RF communication, we can actually control a pick and place robot.Practical Applications of Pick and Place Robot:
- Defense Applications: It can be used for surveillance and also to pick up harmful objects like bombs and diffuse them safely.
- Industrial Applications: These robots are used in manufacturing, to pick up the required parts and place it in correct position to complete the machinery fixture. It can be also used to place objects on the conveyer belt as well as pick up defective products from the conveyer belt.
- Medical Applications: These robots can be used in various surgical operations like in joint replacement operations, orthopedic and internal surgery operations. It performs the operations with more precision and accuracy.
Now the question remains- How far is the day when robots are going to completely ease the way for humans?



No comments:
Post a Comment