


Introduction:
Now day’s many industries are using
robots due to their high level of performance and reliability and which
is a great help for human beings. The obstacle avoidance robotics
is used for detecting obstacles and avoiding the collision. This is an
autonomous robot. The design of obstacle avoidance robot requires the
integration of many sensors according to their task.
The obstacle detection is primary
requirement of this autonomous robot. The robot gets the information
from surrounding area through mounted sensors on the robot. Some sensing
devices used for obstacle detection like bump sensor, infrared sensor,
ultrasonic sensor etc. Ultrasonic sensor is most suitable for obstacle
detection and it is of low cost and has high ranging capability.

Obstacle Avoidance Robotic Vehicle
Working Principle:
The obstacle avoidance robotic vehicle
uses ultrasonic sensors for its movements. A microcontroller of 8051
family is used to achieve the desired operation. The motors are
connected through motor driver IC to microcontroller. The ultrasonic
sensor is attached in front of the robot.
Whenever the robot is going on the
desired path the ultrasonic sensor transmits the ultrasonic waves
continuously from its sensor head. Whenever an obstacle comes ahead of
it the ultrasonic waves are reflected back from an object and that
information is passed to the microcontroller. The microcontroller
controls the motors left, right, back, front, based on ultrasonic
signals. In order to control the speed of each motor pulse width
modulation is used (PWM).
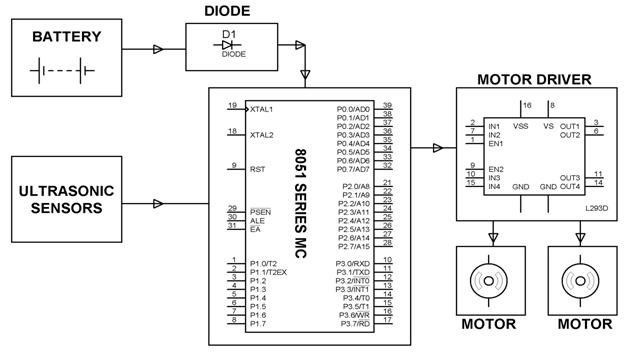
Block Diagram Obstacle Avoidance Robotic Vehicle Circuit
Different Sensors used for obstacle avoidance Robotic vehicle
1. Obstacle detection (IR sensor):
The IR sensors are used for obstacle
detection .The sensor output signal send to the microcontroller. The
microcontroller controls the vehicle (forward/back/stop) by using the DC
motor which is placed in vehicle. If any obstacle placed in line the IR
sensor fails to receive the light rays and gives signals to the
microcontroller. The microcontroller will stop the vehicle immediately
and siren will on. After one minute the robot will be check the path
status, if obstacle is removed the robot move far word else the robot
will return back to move starting place. The sensor detects objects by
emitting a short ultrasonic burst and then listening for the eco. Under
control of a host microcontroller, the sensor emits a short 40 KHz
explosion. This explosion ventures or travels through the air, hits an
article and after that bounces once again to the sensor. The sensor
provides an output pulse to the host that will terminate when the echo
is detected; hence the width of one pulse to the next is taken into
calculation by a program to provide result in distance of the object.
2. Path detection (proximity sensor):
The normal case both sensors giving the
guidelines and robot follows it going straight on path. When the line
is end at that time the robot reverse at 180 and turns back the same
place.
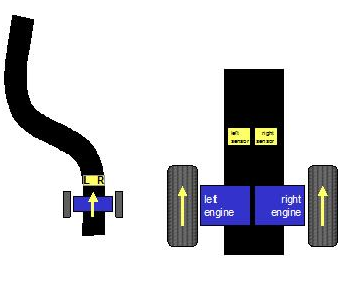
Being On Line
The proximity sensors are used for path
detection. When the right sensor is not detected the curve line, the
microcontroller activates the left motor to turn left until the signal
from right sensor. Once signal is detected right sensor, the two motors
are activated to go forward. When the line is end at that time the robot
reverse at 180 and turns back the same place.
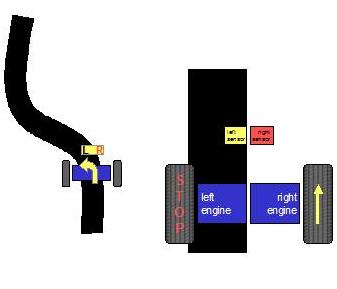
Loosing the Line
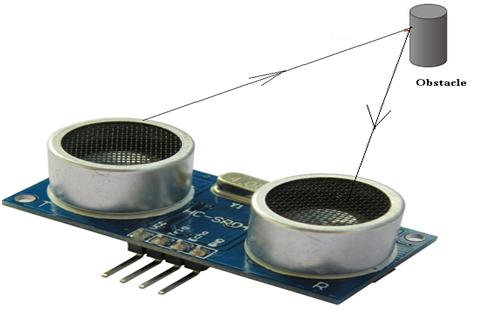
3. Ultrasonic Sensor:
The ultrasonic sensor is used for
obstacle detection. Ultrasonic sensor transmits the ultrasonic waves
from its sensor head and again receives the ultrasonic waves reflected
from an object.
There are many applications use
ultrasonic sensors like instruction alarm systems, automatic door
openers etc. The ultrasonic sensor is very compact and has a very high
performance.
Ultrasonic Sensor General Diagram
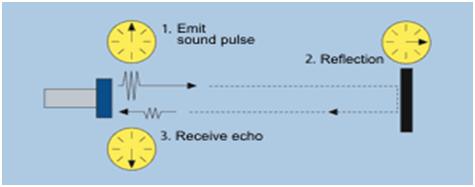
Working Principle:
The ultrasonic sensor emits the short
and high frequency signal. These propagate in the air at the velocity of
sound. If they hit any object, then they reflect back echo signal to
the sensor. The ultrasonic sensor consists of a multi vibrator, fixed to
the base. The multi vibrator is combination of a resonator and
vibrator. The resonator delivers ultrasonic wave generated by the
vibration. The ultrasonic sensor actually consists of two parts; the
emitter which produces a 40 kHz sound wave and detector detects 40 kHz
sound wave and sends electrical signal back to the microcontroller.
Ultrasonic Working Principle
The ultrasonic sensor enables the robot
to virtually see and recognize object, avoid obstacles, measure
distance. The operating range of ultrasonic sensor is 10 cm to 30 cm.
When an electrical pulse of high voltage
is applied to the ultrasonic transducer it vibrates across a specific
spectrum of frequencies and generates a burst of sound waves. Whenever
any obstacle comes ahead of the ultrasonic sensor the sound waves will
reflect back in the form of echo and generates an electric pulse. It
calculates the time taken between sending sound waves and receiving
echo. The echo patterns will be compared with the patterns of sound
waves to determine detected signal’s condition.
Note: The ultrasonic receiver
shall detect signal from the ultrasonic transmitter while the transmit
waves hit on the object. The combination of these two sensors will allow
the robot to detect the object in its path. The ultrasonic sensor is
attached in front of the robot and that sensor will also help the robot
navigate through the hall of any building.
- Automatic change over’s of traffic signals
- Intruder alarm system
- Counting instruments access switches parking meters
- Back sonar of automobiles
- Compact and light weight
- High sensitivity and high pressure
- High reliability
- Power consumption of 20mA
- Pulse in/out communication
- Narrow acceptance angle
- Provides exact, non-contact separation estimations within 2cm to 3m
- The explosion point LED shows estimations in advancement
- 3-pin header makes it simple to connect utilizing a servo development link
- Especially military applications
- It can be used for city wars
Photo Credit:
- Ultrasonic Sensor General Diagram by Letsmakerobots
- Ultrasonic Sensor Working Principle by Microsonic



No comments:
Post a Comment